
Reasoning about actions and change in argumentation
Abstract
This paper studies how logic-based reasoning about actions and change (RAC) with its problems of temporal projection and qualification can be formalised in terms of argumentation. In particular, we extend earlier work of translating the language
1.Introduction and motivation
Reasoning about actions and change (RAC) has been an important problem in the development of artificial intelligence (AI). Starting with the early and foundational work of the situation and event calculi (Kowalski and Sergot, 1986; McCarthy and Hayes, 1969) there has been a wide interest in understanding and solving the central problems that underly RAC, namely the frame, ramification and qualification problems leading to several ‘action languages’ such as the
The relatively recent realisation that non-monotonic reasoning can be addressed using argumentation (e.g. Bench-Capon and Dunne, 2007; Bondarenko, Dung, Kowalski, and Toni, 1997; Dung, 1995; Kakas, Kowalski, and Toni, 1992) has led to the study of RAC through argumentation in works such as (Kakas, Miller, and Toni, 1999; Vo and Foo, 2005). Hence given some narrative information we can use argumentation to capture temporal projection from this and general knowledge about the causal laws of our problem domain. As shown in Kakas et al. (1999), where the language
In this paper we extend this argumentation-based formulation of language
We will be mainly concerned with domains that language
RAC is an area that is concerned with the study of how (some of) the properties of our problem domain, normally called Fluents, change when new information is acquired such as the occurrence of Actions and how this view of the problem world is affected by the explicit observation of some properties holding or not at a particular stage (or time) in the flow of change. The change is governed by domain-specific causal laws that describe how the particular properties (or fluents) of interest are generated or terminated by actions and the domain-independent principle of frame inertia that properties do not change but rather persist, unless some action occurrence causes them to change via some causal law. The main aim of the reasoning is then to maintain, normally under the case of incomplete information, an accurate view of the problem world as things occur and/or are observed with the passage of time given in a specific narrative ofinterest.
To illustrate the types of problems that will concern us and the general approach that we will follow let us consider a standard example in RAC, that has the name the ‘ Car Park Domain’ (Kautz, 1986). This domain when expressed in the language

For domains like this, where a fluent (e.g. CarInParkingSpace) changes its truth value without any known causal explanation, language
Pictorially, the way our argumentation framework behaves as we update the domain description for the parking domain example, is illustrated in Figure 1 where KB denotes the domain description, PC the action ParkingCar and CPS the fluent CarInParkingSpace. The arrows in the pictures show the different arguments (for the fluent CSP and its negation) that exist in each case.
Figure 1.
Parking domain.
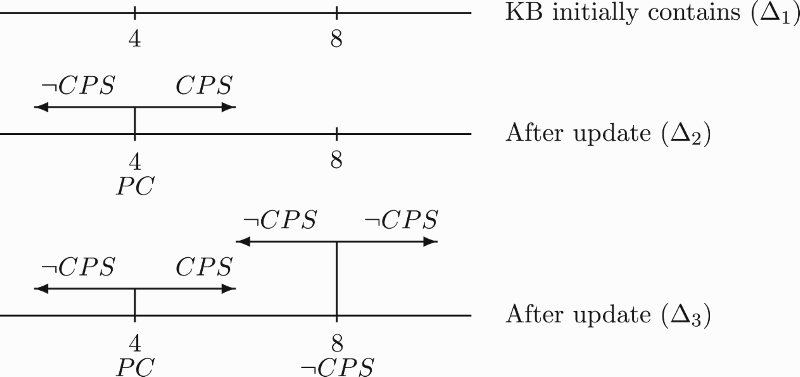
Suppose now that we extend the parking domain example by adding in the narrative another observation at time 12 of the form:
CarInParkingSpace holds at time 12 (
This will also result in an unknown value for the fluent CarInParkingSpace in the interval
The argumentation-based formalisation that we will develop in this paper is essentially a preference based (see, e.g. Modgil and Prakken, 2013) realisation of an abstract argumentation framework (Dung, 1995) under the admissibility semantics. Following the approach in Kakas et al. (1999), we will build the preference-based argumentation framework in terms of logic programming rules with a priority relation over these rules. Our work then can be seen as an example where the general theory of argumentation, that has been extensively and widely developed over the past two decades in AI (see, e.g. Bench-Capon and Dunne, 2007; Rahwan and Simari, 2009), finds concrete application in addressing the foundational problems of temporal persistence and knowledge qualification.
This synthesis of ideas opens up possibilities of extending the application of argumentation from ‘static problems’ to variations of these where the problem environment is dynamically changing as new information becomes available. Using argumentation for reasoning about changes in the problem's world domain offers a principled way to manage the changes in the argumentation framework under which the application problem is expressed, thus extending the use of argumentation from static to ‘dynamic problems’.
The rest of the paper is organized as follows. Section 2 gives a brief review of the language
2.A brief review of language E
Language
The language uses three kinds of sentences or propositions defined as follows, where A is an action constant, F is a fluent constant, T is a time point, L is a fluent literal and C is a set of fluent literals:
(1) c-propositions (c stands for causes), of the form ‘ A initiates F when C’ or ‘ A terminates F when C’,
(2) h-propositions (h stands for happens) of the form ‘ A happens-at T’,
(3) t-propositions (t stands for time point) of the form ‘ L holds-at T’.
The first type of sentence is used to express the causal laws of our domain, i.e. how action occurrences generate a property or stop a property from holding. The other two types of sentences are used to describe the particular narratives of interest. The first is used to state what actions have occurred while the latter type of sentences, namely the t-propositions, which will also be called observations, are used to represent properties of the world known to hold at particular time points.
A domain description D is a set of t-, h- and c-propositions. The c-propositions form the background world knowledge of the domain and the t- and h-propositions the narrative of the domain.
The semantics of language
Definition 2.1
Definition 2.1interpretation
Given a domain description D, an interpretation of D is a mapping
An interpretation may or may not support the initiation or termination of a fluent property depending on whether the preconditions in the causal laws of the domain description are satisfied or not under the interpretation.
Definition 2.2
Definition 2.2initiation-termination point
Given an interpretation H of a domain description D, a time point T is an initiation (resp. termination) point of a fluent F in H in D when, D contains a combination of a c-proposition ‘ A initiates (resp. terminates) F when C’ and an h-proposition ‘ A happens-at T’ , such that C at T is satisfied by the interpretation H.
An interpretation is then a model when it satisfies the property of persistence, namely that, within any time interval the truth value assigned by a model to any fluent remains the same or persists, changing from false to true (resp. from true to false) only at an initiation (resp. termination) point for that fluent that is supported by some action occurrence and associate causal law under which the action changes the fluent.
Definition 2.3
Definition 2.3model
Let D be a domain description. An interpretation H is a model of D if and only if for every fluent constant F and time points
(1) If there is no initiation-point or termination-point
(2) If
(3) If
(4) For all t-propositions in D of the form ‘ F holds-at
The property of persistence is expressed by the first three conditions with the second and third conditions also capturing the semantic meaning of the causal laws expressed by the c-propositions. The fourth condition imposes the requirement that models must respect all the observations (t-propositions) of fluents literals contained in the narrative of the given domain description.
The above definition of a model is a slightly extended definition of the original definition in Kakas and Miller (1997) that allows non-deterministic models when we have domains where there exist time points that can be simultaneously initiation and termination points for the same fluent. For this we have replaced, in the second and third conditions of the original definition, the restriction on the intermediate time point,
Given the notion of a model, entailment and consistency of formulae of the form ‘ L holds-at T’, where L is a fluent literal are then defined in the usual way. Hence ‘ L holds-at T’ is consistent in D iff there exists a model, M, of D such that
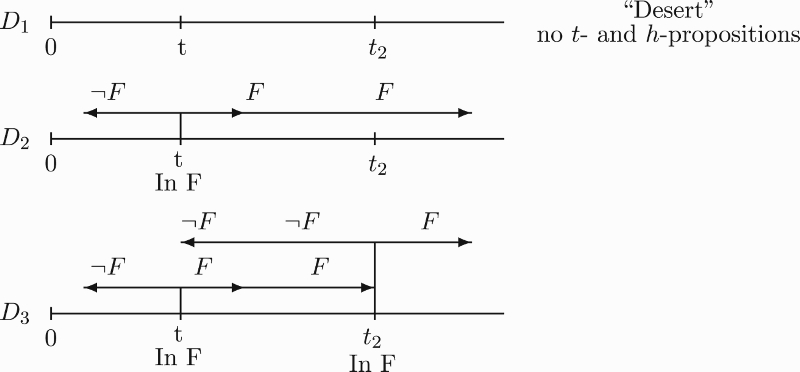
The following simple examples illustrate the (above variant of) language
Figure 2.
Example domains.
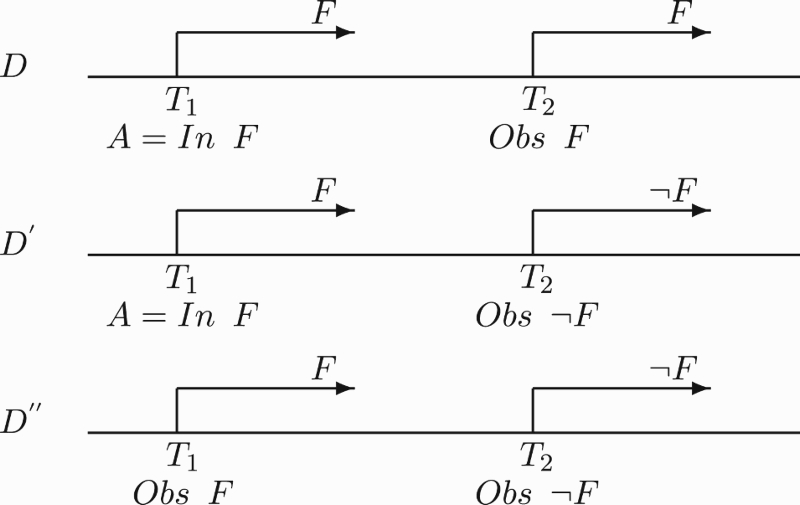
Example 2.4
Example 2.4domain D
A initiates F
A happens-at
F holds-at
In domain D we have an initiation point at time
Example 2.5
Example 2.5domain D ′
A initiates F
A happens-at
Then this domain, which is similar to the car parking domain discussed in the introduction, does not have any models. The generation of F holding onwards from
Example 2.6
Example 2.6domain D ″
F holds-at
Example 2.7
Example 2.7domain D ‴
A initiates F
B terminates F
A happens-at
B happens-at
We have two possible models for times after time
3.Argumentation formulation
The language
We will extend this reformulation so that t-propositions are taken into account directly within the argumentation. To do so we will generalize the original formulation by introducing new arguments that are rooted or based on observations. In addition, we will use backward temporal persistence arguments as well as forward ones to allow us to address the qualification problem.
To translate a given domain description D into an argumentation program in LPwNF, all individual h- and c-propositions translations are included in the background theory as follows. We will consider time to be discrete scalar.
Definition 3.1
Definition 3.1background theory for D
The background theory for D is the theory
for all time points T and
for each c-proposition ‘ A initiates F when
for each c-proposition
where
The above definition is essentially the same as in Kakas et al. (1999) with the exception that the given observations are also added in
Definition 3.2
Definition 3.2argumentation program of D
The argumentation program corresponding to a domain D is
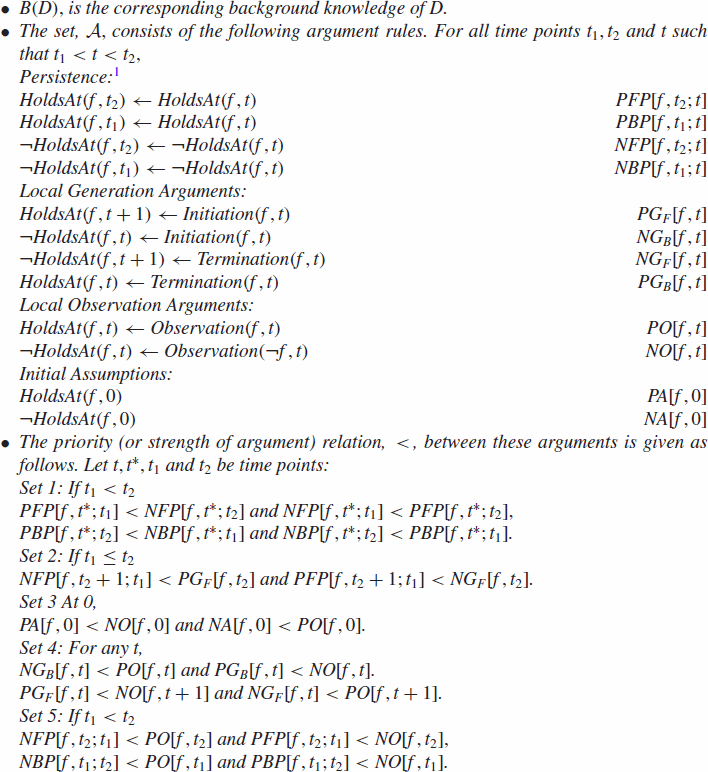
This definition introduces four different types of arguments and the relative strength between them. These types of arguments express in a natural way the defeasible conclusions that we can draw or support from the non-defeasible information in
Let us explain the various parts of this definition. Consider first the various arguments rules.
Persistence rules : These rules express the possibility of fluent properties persisting forward and or backward in time. The first rule captures the forward persistence from a property holding at t to holding at a latter point
Local generation arguments : These are argument rules for the causation of a property by an event. The first rule says that the effect of an initiation point at time t starts at the very next time point, while the second rules say that from this initiation point we have an argument that its effect does not hold at the time of the event that generates the property. Analogously for the following two rules based on termination points.
Local observation arguments : Observations give directly arguments for fluents holding or not at the time of observation.
Initial assumptions : Assumptions can only be introduced at time 0 and can be for a property holding or not holding.
Let us now comment on the priority relation. We first note that the priority relation, <, in an argumentation program is independent of the domain description, D. It is a universal relation that will us capture the general principles of persistence and qualification.
Set 1: The first set of priorities in the above definition make forward persistence arguments that are based on a later time point stronger than conflicting forward persistence arguments that are based on an earlier time point. Analogously, backward persistence arguments that are based on earlier time points are stronger than conflicting backward persistence arguments that are based on later time points.
Set 2: This set of priorities expresses the fact that the generation of effects is stronger than opposing persistence.
Set 3–Set 5: The final three sets of priorities give, as expected, higher strength to observation arguments over any other type of conflicting arguments.
We note that included in the types of arguments are the two local generation arguments,
In the priority relation there is no priority between conflicting forward and backward arguments. Such priorities can be additionally set when we wish to impose further properties on the temporal reasoning. Finally, we note that the assumption arguments are not chosen to be weaker than the conflicting backwards persistence arguments to allow the freedom of incomplete initial states.
The semantics of these LPwNF argumentation programs is given through the standard argumentation notion (see Dung, 1995; Kakas et al., 1994) of maximally admissible subsets of the given argumentation program, called admissible extensions, as follows.
Definition 3.3
Definition 3.3background logic
The background monotonic logic is the tuple
The above definition expresses formally the logical reasoning that allows the link of the background knowledge with the argument rules so that arguments supporting a fluent literal conclusion can be constructed. These arguments are grounded on the narrative given in the domain description D and translated in the corresponding background knowledge B(D).
The attacking relation is then defined amongst sets of argument rules that have conflicting conclusions by taking into account the priorities on the argument rules as given in Definition 3.2.
Definition 3.4
Definition 3.4attack
Let
Hence the attacking relation is defined by lifting the priorities from the level of single argument rules to sets of these. For a set G of argument rules to attack another set W it must contain at least one rule of higher priority than a rule in the attacked set W or otherwise the set W must (also) not contain any rule of higher priority than some rule in the attacking set G. In this way we ensure that the attacking set is not ‘weaker’ than the attacked set as either it contains a stronger rule or the two sets are non-comparable. Note that if a set is inconsistent, i.e. it derives both a literal and its negation then it attacks itself as the second condition in the definition of the attacking relation is trivially satisfied.
The following definition introduces some technical conditions on sets of argument rules that are more specific to the use of argumentation to the particular application of RAC.
Definition 3.5
Definition 3.5closed, complete and compact
A set Δ of argument rules is closed if all the bodies of its rules are derived via ├ from the background theory
The condition of closeness is a technical condition to avoid considering unnecessarily argument sets that contain rules which cannot be used to support conclusions. Similarly, the compactness property imposes a uniqueness of support for the conclusions drawn through persistence arguments requiring that any such conclusion (timed fluent literal) is supported in a uni-directional way, i.e. either by a forwards persistence or by backwards persistence but not (redundantly) by both such arguments. These technical conditions are conditions that avoid redundancy and help to simplify the framework and the proofs of its formal properties, particularly the link with the model theory of language
Finally, the property of completeness is a desired property for the semantics of the approach so that the admissible extensions, that will define the semantics, are able to decide for any fluent at any time point its status, i.e. they can populate the whole time line with a decision on whether any fluent holds or not. This condition is also motivated by the technical consideration of relating the semantics to the model theory semantics of the language
Definition 3.6
Definition 3.6admissibility
Let D be a domain description and
(i)
(ii) for any
This is the standard definition of admissibility. A subset of arguments is admissible if it does not derive both
The semantics of domain descriptions is then given by putting these notions together to define admissible extensions of the corresponding argumentation program.
Definition 3.7
Definition 3.7admissible extension
Let D be a domain description and
We note that alternatively we could have omitted the explicit requirement of completeness and replaced this with the maximality condition as we normally have with the preferred semantics of argumentation. Nevertheless, remaining within the spirit of RAC and as complete extensions are maximal it is natural to define the semantics only in terms of the complete admissible extensions provided that complete extensions exist, which as we will see in the next section, is indeed the case. Complete admissible extensions then correspond more closely to the stable semantics of argumentation as they cannot be extended consistently (i.e. without self-conflict) by any other subset of argument rules that support a conclusion that is not already supported by the complete extension.
Conclusions from an admissible extension are then drawn using the derivability relation, ├, given in Definition 3.3, with credulous conclusions those that can be derived from at least one admissible extension and sceptical conclusions as those that are derived in every admissible extension.
To illustrate the above definition of the argumentation semantics let us consider our earlier example domains D (Example 2.4),
Figure 3.
Example domains and arguments.
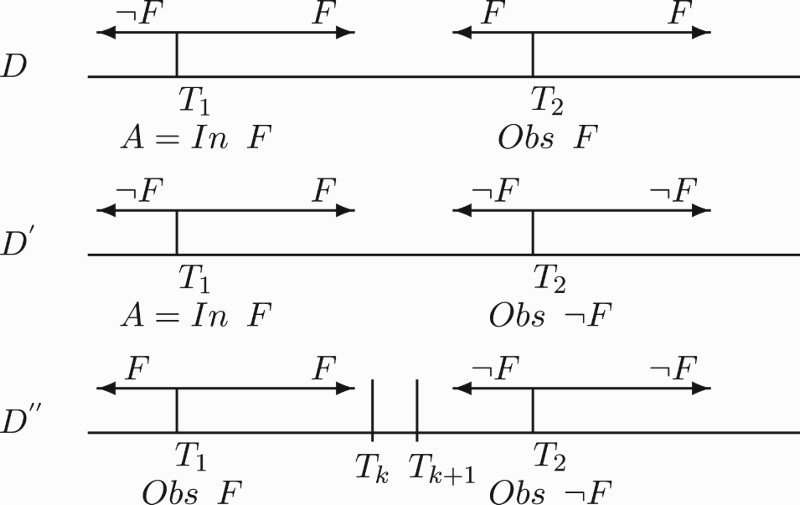
Figure 4.
Examples.
For the domain
The examples that follow illustrate further the argumentation formulation. Let f be any fluent and
Example 3.8.
Let
Example 3.9.
Let
Note that if we additionally have in the domain
4.Formal results
In this section we present a set of formal results that show the various properties that the argumentation formulation given above has with respect to persistence and qualification, how this formulation gives meaning to any domain description theory and how it relates to and extends the original model theoretic formulation of language
Firstly, as expected, we show that admissible extensions are consistent with the observations in the given narrative. From now on we will consider only point-wise consistent domain descriptions, i.e. domain descriptions that do not contain any pair of t-propositions of the form ‘ f holds-at t’ and ‘
Proposition 4.1.
Let D be a point-wise consistent domain description and E an admissible extension of the corresponding argumentation program
Proof.
see Appendix 2.
This is a simple basic result that is needed for the main result of showing the existence of admissible extensions for any description domain and for linking admissible extensions with the models of language
The next result shows that the admissible extensions satisfy the important property of persistence of derivation of fluent properties along the time line. Informally, it says that if between two time points there is no information, either causal or observational in nature, that a fluent has changed value then an admissible extension will derive a constant value for the fluent in this time interval.
Lemma 4.2.
Let D be a point-wise consistent domain description and E an admissible extension of D. Let f be a fluent and
Proof.
see Appendix 1.
Therefore the notion of admissibility in argumentation helps us to capture the requirement of persistence. Admissible extensions must have this property of persistence as otherwise they will have attacks that they cannot counter-attack. This plays an important role in showing the next theorem which gives the central result of the argumentation formulation, namely that any domain description D (with a countable narrative) is always consistent, i.e. there always exists an admissible extension of the corresponding argumentation program of D.
Theorem 4.3.
Let D be a point-wise consistent domain description with time structure that of the natural numbers and a countable number of h- and t-propositions. Then there exists an admissible extension E of the corresponding argumentation program
Proof.
see Appendix 3.
Hence any domain description D is given a meaning under the above argumentation semantics. For example, as we have seen above, the example domains
The formal link of our argumentation formulation of the language
Theorem 4.4.
Let D be a point-wise consistent domain description with time structure that of the natural numbers and a countable number of h-propositions . Then for every language
Proof.
see Appendix 3.
This theorem shows that when language
The next theorem provides an interpretation of how the extended argumentation formulation handles the qualification problem when it provides a semantics to any domain description. It shows that an admissible extension E of any domain D can be interpreted as a language
Theorem 4.5.
Let D be a point-wise consistent domain description with a finite number of h-propositions and t-propositions. For every admissible extension E of D there exists a domain
Proof.
see Appendix 3.
For example consider the domain
5.Qualification extensions
In this section we study in more detail how the argumentation semantics that we have provided for action theories addresses the qualification problem. In particular, we will examine how it helps us understand qualifications of action occurrences and how we can find, within the given domain description, explanations for exogenous qualifications.
The argumentation formulation allows us to identify exogenous qualifications imposed by the lack of information in the given narrative of the domain description.
Definition 5.1.
Let D be a domain description and E an admissible extension of D such that there exist time points
The t-proposition ‘
There exists an h-proposition ‘ A happens-at
There exists no termination point for F at t in E such that
Then E is called an exogenous qualification extension on F at
Furthermore, if there does not exist a time point
Qualification extensions are therefore separated into two types. In the first case, the action occurrence of A at
The above definition of exogenous qualification captures instances of direct qualification in the sense that the qualification is linked directly to the fluent through which the disparity between what is observed and what is described by the domain and its semantic extensions, manifests itself. The domain description implies that F (respectively
Figure 5.
Domain
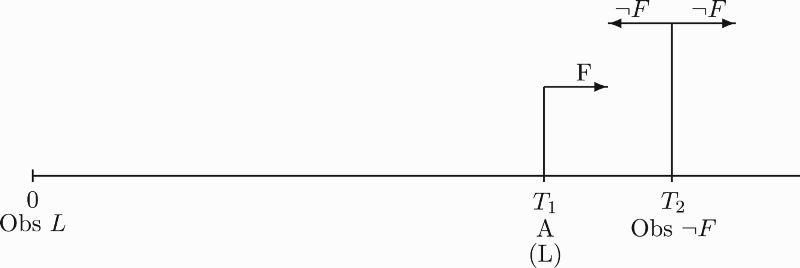
Example 5.2
Example 5.2domain QD 1
A initiates F when L
A happens-at
L holds-at
All the admissible extensions of this domain are exogenous qualification extensions on F. In particular, one of these extensions is an exogenous qualification of the action occurrence of A at
We can thus translate or explain the exogenous qualification of the action A at
Definition 5.3.
Given a domain description D and E an exogenous qualification extension of an action occurrence A on F at
H is point-wise consistent with the t-propositions already in D and H does not contain a t-proposition of the form ‘ F holds-at t’ for
E is no longer an exogenous qualification extension of the action occurrence A at
H is called a qualification explanation (with respect to E) (or the initial state of
In addition, as is usual with abductive explanations, we can require that qualification explanations are minimal with respect to set inclusion.
Hence in the previous Example 5.2,
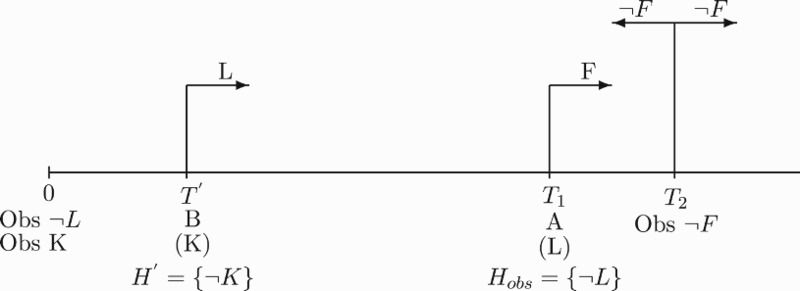
Example 5.4
Example 5.4domain QD 2
A initiates F when L
A happens-at
B initiates L when K
B happens-at
Figure 6.
Qualification explanations for domain
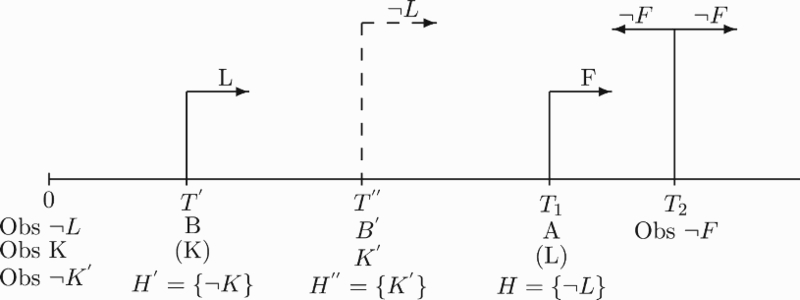
Hence under either of these cases, as in the previous example, a qualification explanation for the exogenous qualification of the action occurrence of A at
Figure 7.
Qualification explanation H for domain
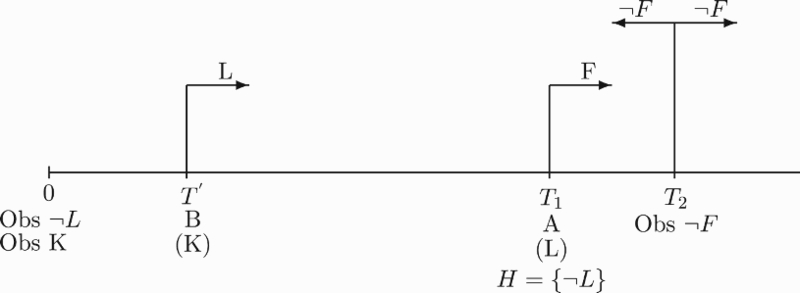
We can then explain this new exogenous qualification by adding the extra t-proposition, ‘
Then if also the initial state is such that
Figure 8.
Qualification explanation
Furthermore, the new t-proposition, ‘
In general, there are two types of qualification explanation domains: ones that block a generation point as we have seen in the examples above and explanations that activate an intermediate generation point to block persistence. Let us consider an example of the latter type. In the example domain
Hence as we have seen in the example above, qualification explanations can be built iteratively by pushing the exogenous qualification they explain to an earlier action and replacing (elements of) the initial explanation by an explanation of the exogenous qualification of the earlier action. The following property linking the qualification explanations of actions holds in general.
Property: Let D be a domain, E an exogenous qualification extension of an action occurrence A at
or
or
Hence as we have seen above in the example domain
Based on this property we can then develop algorithms to find qualification explanations of action failures by systematically following backwards the time line from the time of an unexpected observation, such as ‘
6.Related work
Our work follows the EC approach for RAC and the realisation of this through argumentation. It extends the earlier argumentation-based approach for the EC language
Interestingly, our formulation comes closer to the original EC (Kowalski and Sergot, 1986) . Like the original EC it has a symmetrical treatment of forward and backward reasoning from events, unlike the later formulations of the simplified EC (Miller and Shanahan, 1999; Shanahan, 1997) where the emphasis is mainly on reasoning forward from events. The original EC is based upon the notion of events and time periods generated by the events. There are two types of time periods,
Such rules are analogous to the arguments
This symmetrical nature of reasoning with time in the EC is mirrored with the symmetry of forward and backwards persistence arguments in our formulation. Hence both formalisms have similar effects especially when reasoning in the past. To illustrate this consider the simple example:
Example 6.1
Example 6.1domain D ′ ′ ′ ′
A initiates F
B initiates F
A happens-at
B happens-at
In this domain the original EC concludes that there exists an end point i of the time period
Hence both formulations essentially conclude the existence of at least one unknown event at some intermediate time point
The above example may be a little specialised. The more natural case of this effect of incorporating backwards persistence is seen in Examples 2.5 and 2.6 where observations are involved. The observations indicate a change in the value of a fluent at some unknown time within a certain time period. This is captured by our formulation thus showing how the original EC could be extended to allow observations in its domain descriptions.
Another approach to RAC using argumentation is that of Vo and Foo (2005). This work addresses the main problems of RAC, in particular the frame, and qualification problems, using a formulation that is based on argumentation and in particular the ABA argumentation framework of Bondarenko et al. (1997). As in Bondarenko et al. (1997), it uses argumentation assumptions that complement the logical knowledge to draw inferences from a domain description. There are two types of assumptions associated with each fluent literal: frame and qualification assumptions. The frame assumptions allow the persistence of a fluent literal as these assumptions can be assumed at any time point. Unlike our approach which relies directly on argumentation to capture persistence through the use of persistence arguments, the effect of persistence in Vo and Foo (2005) is obtained indirectly by the freedom of their formalism to make these frame assumptions. This though imposes the need to control this freedom by additional requirements imposed on top of a first structure they obtain via the argumentation requirement of preferred frame assumptions, called pre-models, in order to narrow down the possibilities of frame assumptions. This extra requirement is outside the standard argumentation notions imposing a ‘minimisation of change’ on the pre-models.
Subsequently, in order to handle also the qualification problem another type of assumptions is introduced, the qualification assumptions. These are ‘externally’ linked with each of the causal rules that generate fluent literals and are thought off as encompassing all the exogenous (unknown) qualification conditions that can block the generation of the fluent literal through the causal law. Then again a further technical machinery is developed on top of this with notions such as, plausible, unsound and rejected sets of assumptions, which need to be imposed on the initial pre-models, i.e. outside the argumentation formulation. In this filtering it is also necessary to impose carefully a preference of qualification assumptions over frame assumptions in order to solve both the frame and qualification problems together.
Hence although the two approaches have similarities as they are both based on argumentation they have crucial differences which can have an effect both at the representation and computational level. For example, the assumption arguments in Vo and Foo (2005) are of various types and are operational in nature rather than expressing some declarative knowledge in the domain. In contrast, our approach works directly on the given declarative knowledge of the problem: assumptions can only made at the initial time point and importantly they are declarative statements.
Furthermore, our approach addresses the problem of RAC entirely within standard argumentation notions with no reliance on any other formal structure. One of the reasons why this is not the case for the case of Vo and Foo (2005) is the overly liberal freedom to make assumptions in the first place. In our case the arguments considered need to be grounded (or supported) by the given domain description and particularly the narrative it contains. We can thus apply the argumentation process directly on the given knowledge capturing the required reasoning in a natural and simple way. This difference in the two approaches is highlighted by the way each approach uses priorities between arguments. In Vo and Foo (2005), the priorities are used on top to filter pre-structures whose definition depends on notions of argumentation only at a first level whereas in our case the priority is integrated within the argumentation process allowing the notions of argumentation to be sufficient to directly capture the semantics and the reasoning required.
As Vo and Foo (2005) argue, one of the main advantages of an argumentation-based approach to the central challenges of RAC and default reasoning more generally, is that the reasoning can be made more explicit compared to other non-monotonic approaches. This is a general feature shared by most argumentation-based application frameworks including our own in this paper, whose relative simplicity and direct use of argumentation makes it easy to exploit this advantage.
7.Conclusions and further work
We have re-examined the argumentation reformulation of language
For future work we will examine how we can integrate our framework for reasoning about properties over time with argumentation-based approaches for decision-making so that these decisions can be context sensitive over time. This will allow us to develop applications of advisory or recommendation systems, as in Chesñevar, Maguitman, and Simari (2004), that can adapt themselves as their external environment evolves. Similarly, we want to apply our framework to planning problems and in particular to the revision of plans as new unexpected information is acquired.
In particular, as the dialectic nature of argumentation is close to human reasoning, with recent studies from cognitive psychology (Mercier and Sperber, 2011) reinforcing this view, our argumentation-based approach for RAC can help its integration with wider forms of human reasoning such as that of discourse comprehension, dialogue and debate. Recent work on story comprehension (Diakidoy, Kakas, Michael, and Miller, 2014) has shown how argumentation can play a significant role in formulating and automating the human process of comprehension. Similarly, in multi-agent systems interaction and communication several works, e.g. McBurney and Parsons (2009) and Kakas, Maudet, and Moraitis (2004), have shown the suitability of using argumentation to model agent dialogues by exploiting the dialectic and game theoretic form of argumentation.
The dynamic nature of dialogues then lends itself to a uniform argumentation-based formalisation for integrating reasoning about changes in the environment of communication with the various dialogue protocols. In particular, the incremental process of a dialogue can be modelled in terms of dynamic argumentation by generalising the proof and game theories of computation (Dung, Kowalski, and Toni, 2006; Modgil and Caminada, 2009) for static argumentation. Allowing arguments to be time dependent we can adapt over time by tracking the changes of arguments and the attacking relation between them. Real-life problems can then be mapped to argumentation frameworks, constructed incrementally from the dynamic knowledge of the problem, e.g. the information exchanged at different time points of a dialogue.
Another way to address these problems of dynamic development is to examine the link between our work and that of dynamic argumentation (see, e.g. Baumann and Brewka, 2010; Liao, Jin, and Koons, 2011) where RAC with new information in the time line of an application problem realizes a dynamic argumentation framework. New arguments and attacks between arguments are enabled as the information unfolds, particularly by observations causing exogenous qualification. We can also explore how various problems that have been studied in the general setting of dynamic abstract argumentation can help address problems in RAC such as overcoming an exogenous qualification by finding what actions need to occur so that some conclusion would necessarily follow.
Notes
1 PFP (resp.
2
3 An initiation or termination point for a fluent f in an admissible extension E is defined as in Definition 2.2 where now the preconditions C of the c-proposition are satisfied at T in E when the corresponding HoldsAT conclusions are derived by E.
4 For simplicity of presentation we are assuming that there can only be one generating (initiating or terminating) action of a given fluent at any time point.
5 When we have the other case of ‘L holds-at
6 Note that
Disclosure statement
No potential conflict of interest was reported by the authors.
References
1 | Baumann R., & Brewka G. ((2010) ). Expanding argumentation frameworks: enforcing and monotonicity results. Computational models of argument: Proceedings of COMMA 2010, Desenzano del Garda, Italy, September 8–10, 2010, pp. 75–86. |
2 | Bench-Capon T. J. M., & Dunne P. E. ((2007) ). Argumentation in artificial intelligence. Artificial Intelligence, 171: , 619–641. doi: 10.1016/j.artint.2007.05.001 |
3 | Bondarenko A., Dung P. M., Kowalski R. A., & Toni F. ((1997) ). An abstract, argumentation-theoretic approach to default reasoning. Artificial Intelligence, 93: , 63–101. doi: 10.1016/S0004-3702(97)00015-5 |
4 | Chesñevar C. I., Maguitman A. G., & Simari G. R. ((2004) ). A first approach to argument-based recommender systems based on defeasible logic programming. Proceedings of the 10th international workshop on non-monotonic reasoning (NMR 2004), Whistler, Canada, June 6–8, 2004, pp. 109–117. |
5 | Diakidoy I. A., Kakas A. C., Michael L., & Miller R. ((2014) ). Story comprehension through argumentation. Proceedings of the 5th international conference on computational models of argument (COMMA 2014), September, Frontiers in artificial intelligence and applications (Vol. 266, pp. 31–42). Scottish Highlands: IOS Press. |
6 | Dimopoulos Y., & Kakas A. C. ((1995) ). Logic programming without negation as failure. Logic programming, proceedings of the 1995 international symposium, Portland, OR, USA, December 4–7, 1995, pp. 369–383. |
7 | Dung P. M. ((1995) ). On the acceptability of arguments and its fundamental role in nonmonotonic reasoning, logic programming and n-person games. Artificial Intelligence, 77: , 321–357. doi: 10.1016/0004-3702(94)00041-X |
8 | P. M. Dung, R. A. Kowalski, & Toni F. ((2006) ). Dialectic proof procedures for assumption-based, admissible argumentation. Artificial Intelligence, 170: , 114–159. doi: 10.1016/j.artint.2005.07.002 |
9 | Gelfond M., & Lifschitz V. ((1993) ). Representing action and change by logic programs. The Journal of Logic Programming, 17: , 301–321. doi: 10.1016/0743-1066(93)90035-F |
10 | Kakas A. C., Kowalski R. A., & Toni F. ((1992) ). Abductive logic programming. Journal of Logic and Computing, 2: , 719–770. doi: 10.1093/logcom/2.6.719 |
11 | Kakas A. C., Mancarella P., & Dung P. M. ((1994) ). The acceptability semantics for logic programs. Logic programming, proceedings of the eleventh international conference on logic programming, Santa Marherita Ligure, Italy, June 13–18, 1994, pp. 504–519. |
12 | Kakas A. C., Maudet N., & Moraitis P. ((2004) ). Flexible agent dialogue strategies and societal communication protocols. Paper presented at the 3rd international joint conference on autonomous agents and multiagent systems (AAMAS 2004), New York, NY, USA, August 19–23, 2004, pp. 1434–1435. |
13 | A. Kakas, & Miller R. ((1997) ). A simple declarative language for describing narratives with actions. Journal of Logic and Algebraic Programming, 31: , 157–200. doi: 10.1016/S0743-1066(96)00138-0 |
14 | Kakas A. C., Miller R., & Toni F. ((1999) ). An argumentation framework of reasoning about actions and change. LPNMR, El Paso, Texas, USA, pp. 78–91. |
15 | Kautz H. A. ((1986) ). The logic of persistence. Proceedings of the 5th national conference on artificial intelligence: Volume 1: Science, Philadelphia, PA, August 11–15, 1986, pp. 401–405. |
16 | R. Kowalski, & M. Sergot ((1986) ). A logic-based calculus of events. New Generation Computing, 4: , 67–95. doi: 10.1007/BF03037383 |
17 | Liao B., Jin L., & Koons R. C. ((2011) ). Dynamics of argumentation systems: A division-based method. Artificial Intelligence, 175: , 1790–1814. doi: 10.1016/j.artint.2011.03.006 |
18 | McBurney P., & Parsons S. ((2009) ). Dialogue games for agent argumentation. In G. Simari & I. Rahwan (Eds.), Argumentation in artificial intelligence (pp. 261–280). Springer. |
19 | McCain N., & Turner H. ((1997) ). Causal theories of action and change. Proceedings of the AAAI-97, Providence, Rhode Island, pp. 460–465. |
20 | McCarthy J., & Hayes P. ((1969) ). Some philosophical problems from the standpoint of artificial intelligence. Machine Intelligence, 4: , 463–502. |
21 | Mercier H., & Sperber D. ((2011) ). Why do humans reason? Arguments for an argumentative theory. Behavioral and Brain Sciences, 34: , 57–74. doi: 10.1017/S0140525X10000968 |
22 | Miller R., & Shanahan M. ((1999) ). The event calculus in classical logic – alternative axiomatisations. Electronic Transaction of Artificial Intelligence, 3: , 77–105. |
23 | Modgil S., & Caminada M. ((2009) ). Proof theories and algorithms for abstract argumentation frameworks. In G. Simari & I. Rahwan (Eds.), Argumentation in artificial intelligence (pp. 105–129). Springer. |
24 | Modgil S., & Prakken H. ((2013) ). A general account of argumentation with preferences. Artificial Intelligence, 195: , 361–397. doi: 10.1016/j.artint.2012.10.008 |
25 | Rahwan I., & Simari G. ((2009) ). Argumentation in artificial intelligence. Springer Publishing Company, Incorporated. |
26 | Shanahan M. ((1997) ). Solving the frame problem – a mathematical investigation of the common sense law of inertia. MIT Press. |
27 | Thielscher M. ((1999) ). From situation calculus to fluent calculus: State update axioms as a solution to the inferential frame problem. Artificial Intelligence, 111: , 277–299. doi: 10.1016/S0004-3702(99)00033-8 |
28 | Thielscher M. ((2001) ). The qualification problem: A solution to the problem of anomalous models. AIJ, 131: , 1–37. |
29 | Vo Q. B., & Foo N. Y. ((2005) ). Reasoning about action: An argumentation-theoretic approach. Journal of Artificial Intelligence Research, 24: , 465–518. |
Appendices
Appendix 1. Lemma proofs
Proof of Lemma 4.2.
Let f be a fluent,
Again, since there are no termination points for f in
In the second case this backward persistence of
Appendix 2. Propositions proofs
Proof of Proposition 4.1.
By contradiction. Let D be a domain and E an admissible extension that is not consistent with the t-propositions in D. Therefore, there exists a fluent f and a time point t such that ‘ f holds-at t’ belongs to D and
Appendix 3. Theorems proofs
Proof of Theorem 4.3.
Let D be given with a countable number of h- and t-propositions. We will show the existence of an admissible extension E by induction on the number of h-propositions in D.
Base case : Number of h-propositions is zero.
To prove this case we will use a second induction on the number of t-propositions, which we have also assumed to be countable.
Base case: Number of t-propositions is zero.
Let
Induction step : Suppose that there exist a (complete) admissible extension,
Consider the last t-proposition and let its time point be
Case (a) there does not exist such a t-proposition, i.e. the observation at
Case (b) the (last) observation at time
Case (c) the (last) observation at time
By construction,
(i) after
(ii) before
(iii) before
Induction step: Suppose that there exist an (complete) admissible extension,
Consider the last h-proposition that occurred at time point
(Case 1)
(Case 2)
(Case 3)
Hence let us assume that
These changes to
Consider therefore the first t-proposition referring to f after
(
(
(
(b) Changes to
(
(
(
By construction E is complete, consistent and compact. We need further to show that E attacks back any of its attacks. Consider all possible new attacks on E through the different cases given above. Case
Case
Case
Proof of Theorem 4.4.
Let D be given and let M be a language
Base case: Number of h-propositions is zero.
Case (1): Number of t-propositions (observations) in D is zero.
By definition of the Models of
Case (2): The domain D contains t-propositions (observations).
Given the existence of the model, M, of D and the fact that there are no h-propositions in D all observations in D for a given fluent f are either all for f to hold or all for
Induction step : Suppose that the statement holds for any domain such that the number of h- propositions is less or equal to k.
Let D be a domain with
Let f be any fluent:
(i) Let
(ii) Let
(iii) Let
(iv) Let
We then define E as follows:
It remains to show that E attacks all its attacks. New attacks on E that were not attacks on
Proof of Theorem 4.5.
Let E be a given admissible extension of D and consider the interpretation
Violation of property 1: There exist a fluent f and time points
We then add in D a new h-proposition ‘ A happens-at
Violation of property 2: There exist a fluent f and time points
We then add in D a new h-proposition ‘ A happens-at
Violation of property 3: The treatment of this violation is analogous to the violation of property (2) and results in a new domain
We then consider the domain


