
Quantitative analysis of the Tuina manipulation parameters based on Ding’s rolling manipulation
Abstract
BACKGROUND:
In the present scenario, there is no unified measurement standard for the five basic requirements of the Tuina manipulation, such as “lasting, uniform, gentle, powerful and penetrating”, and the descriptions that are solely based on the words are difficult to interpret. As a result, a quantitative study of the Tuina manipulation can aid in the development of a unified standard for Tuina manipulation, thereby assisting the transmission and advancement of the Tuina science.
OBJECTIVE:
Using the Tuina manipulation data gloves and data collection system, and taking Ding’s rolling manipulation as the research object, the present study explored the necessity and significance of quantitative research on the inheritance and development of traditional Tuina manipulation.
METHODS:
Using the Tuina experts as the research object, the manipulation characteristics and parameter signs of Ding’s rolling manipulation were collected and analyzed by employing the “Tuina manipulation data gloves and data collecting system”.
RESULTS:
⟀ The force waveforms, peaks and minima of each detection point altered regularly, and the force values of the front and back pendulum waveforms varied significantly with small differences in the waveform height. ⟁ The Tuina force values of the experts were concentrated in 0.70–0.85 kg, the frequency was concentrated at 120–160 times/min, and the period was about 0.4 s. ⟂ The peak, minimum, and mean of the ai1 channel was greater than ai4, all of which were statistically significant (
CONCLUSION:
It was found that the objectification studies of the experts performing Tuina practices should be based on real clinical process. Furthermore, the results of the quantitative study can present the quantitative characteristics of the expert’s parameters, as well as the details of the manipulation process. Thus, the quantitative study of the parameters is of great significance in the transmission and development of the expert’s manipulation.
1.Introduction
Tuina manipulation is an organic part of the Chinese traditional medicine, and is well known for its clinical efficiency [1, 2]. As the key content of the Tuina manipulation, Ding’s manipulation has always been the focus of Tuina manipulation research and clinical application.
According to the “gist of bone setting mental skill” in the Golden Book of medical school, it has been stated that “once you have a clinical certificate, the machine touches the outside and happens to be born in the inside. The hand turns at will and the method comes out of the hand”. When doctors examine the pulse or touch the surface of the human body, they understand the state of illness an select manipulation that suits the most to the patient’s condition. This requires the manipulator to skillfully use various manipulation and meet the basic requirements of “lasting, uniform, soft, powerful and penetrating” in the treatment process, and these are the requirements and evaluation standards of the current manipulation [4], however, as of date, there are still no unified measurement standards for the manipulation parameters [3]. In this pursuit, many researchers [5, 6] have proposed few research methods of the Tuina manipulation from different angles and achieved modest results.
Previous research on the quantification of the Tuina manipulation has mostly used maneuver measuring instruments or numerical models. Although previous research has aided in the development of the Tuina manipulation, it has largely ignored the clinical setting. Since the Tuina manipulation is a mechanical stimulation of the human body, no matter what kind of manipulation is ultimately applied to the human body, when conducting research, it is necessary to consider the real clinical environment. If the real human muscles and soft tissues are not taken into account, the results obtained from the force measuring instruments or numerical models will inevitably be inadequate to present the results and will fail to explain the five basic requirements of the Tuina manipulation. In order to further explain the five basic requirements of the Tuina manipulation, based on the “Tuina manipulation data glove and data acquisition system”, the present study performed a quantitative study on the force waveform, frequency, cycle and other parameters of the method. Ding’s rolling method was chosen as the study’s subject as it offers a significant stimulation area, a potent action, and a clear deep penetrating effect. It is one of the most widely utilized procedures used in clinical practice.
2.Materials and methods
2.1Test instrument
In previous studies, most of the quantitative studies on the Tuina manipulation were performed on the manipulation force measurement platform. Since such studies are mostly off-body experiments, which ignore the real clinical operation environment and may bring some errors, we developed the Tuina manipulation data glove and data acquisition system for this study based on the previous deficiencies.
Tuina manipulation data gloves and data acquisition system: This was developed by the Teaching and Research Department, TCM Engineering of the Shanghai University of TCM.
2.2Test contents and methods
2.2.1Test subjects
Tuina manipulation experts: 10 professional doctors who were engaged in clinical practice for more than 15 years were employed for the study.
Volunteers: 10 healthy volunteers (male students of the Shanghai University of Traditional Chinese medicine) without obvious contraindications of the Tuina manipulation were employed for the study.
2.2.2Observation index
Rolling manipulation method: the force value (minimum value, peak value, the average value of force), waveform, period and frequency of different parts of the manipulation surface of Ding’s rolling manipulation (Fig. 1).
Figure 1.
Inspection points

2.2.3Test method
Before the test, gloves and data acquisition software were both connected, the power switch was turned on, and the sampling rate was set to 1000 Hz. Doctors and volunteers were informed in advance about not performing any vigorous exercise, one day before the test.
During the test, the doctor wore the Tuina manipulation data gloves. After resting quietly for 5 mins, the doctor operated according to the manipulation requirements of the Ding’s rolling manipulation as per the advanced textbook “Tuina manipulation” [7], which states: (1) The force surface on the back of the hand must always be close to the skin of the treatment area. The internal and external rolling is a form of rolling friction, and it is not allowed to drag and slide back and forth on the treatment area. (2) The strength and rhythm should be uniform, not quick or slow, sometimes light or heavy, or use gravity to hard top forward. (3) During the swing cycle, the operator shall not lift up and leave the treatment site, so as to avoid up and down knocking. (4) The elbow joint of the upper limb should be higher than the wrist joint, and the metacarpophalangeal and interphalangeal joints of the hand should always maintain a natural flexion posture without any active pinching and stretching movements. (5) The alternating flexion and extension of the wrist should be natural and not cause any “jumping”. (6) The frequency of this manipulation should be between 120
2.3Statistical analysis
The three groups of data of all the doctors were screened, and the group containing the most stable data was selected. The middle 10 s were cut out, in order to obtain the waveform and data. During data analysis, the force value analysis was carried out at 6 test points, and channel ai1 was selected for frequency and period analysis. The SPSS 21.0 statistical software was used for statistical analysis.
The measurement data included the mean value, peak value and minimum value of force value, which was expressed as mean
The six channels of the method expert group were divided into three groups: ai1–ai4, ai2–ai5 and ai3–ai6. The three groups of data were compared and obeyed the normal distribution and homogeneity of variance. Two sample
3.Results
3.1Manual waveform characteristics
The waveform of the dynamic process of the Ding’s rolling manipulation is shown in Fig. 2. The waveform was generally stable, and the peaks and troughs of each channel alternated regularly. The variation law of the waveform force value of the front swing and the back swing was obvious (the front swing changes slowly and the back swing changed quickly), and the difference of wave pattern height was small.
The peak value of the Ding’s rolling manipulation was about 0.70 kg–0.85 kg. Compared with the previous literature [7, 8, 9, 10], the force value was obviously small (3 kg–6.6 kg).
3.2Manual force analysis
The force values of the main parts (side and dorsal side of thenar) operated by the Ding’s rolling manipulation are shown in Tables 1 and 2.
Table 1
Force value parameters of each detection point
| Norm | Peak value | Minimum value | Mean value | |
|---|---|---|---|---|
| ( | ai1 | 0.788 | 0.685 | 0.700 |
| ai2 | 0.725 | 0.609 | 0.629 | |
| ai3 | 0.754 | 0.682 | 0.699 | |
| ai4 | 0.690 | 0.589 | 0.607 | |
| ai5 | 0.738 | 0.568 | 0.637 | |
| ai6 | 0.852 | 0.774 | 0.788 |
Figure 2.
Force waveform.
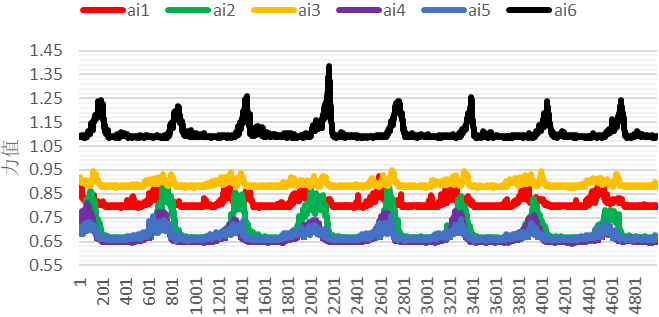
Table 2
Comparison of force values at corresponding test points
| (I) group | (J) group |
|
|
|
|---|---|---|---|---|
| ai1 | ai4 | 0.002 | 0.001 | 0.001 |
| ai2 | ai5 | 0.692 | 0.001 | 0.003 |
| ai3 | ai6 | 0.032 | 0.009 | 0.009 |
(1) Dorsal and Lateral:
⟀ Peak value: The peak value of channel ai1 was greater than that of channel ai4, and the peak value of channel ai3 was less than that of channel ai6, the difference was statistically significant (
⟁ Minimum Value: The minimum value of channel ai1 was greater than that of channel ai4, the minimum value of channel ai2 was greater than that of channel ai5, and the minimum value of channel ai3 was less than that of channel ai6. The difference was statistically significant (
⟂ Average value: The average value of channel ai1 was greater than that of channel ai4, the average value of channel ai2 was less than that of channel ai5, and the average value of channel ai3 was less than that of channel ai6. The differences were statistically significant (
(2) Small thenar side: It can be seen from Table 1 that the peak value followed an order: ai1
(3) Dorsal side of thenar: Table 1 shows that the peak value followed an order: ai6
(4) Overall analysis: It can be seen from Table 1 that the peak value ai6
Figure 3.
Frequency characteristics (times/min).

Figure 4.
Periodic characteristics (s).
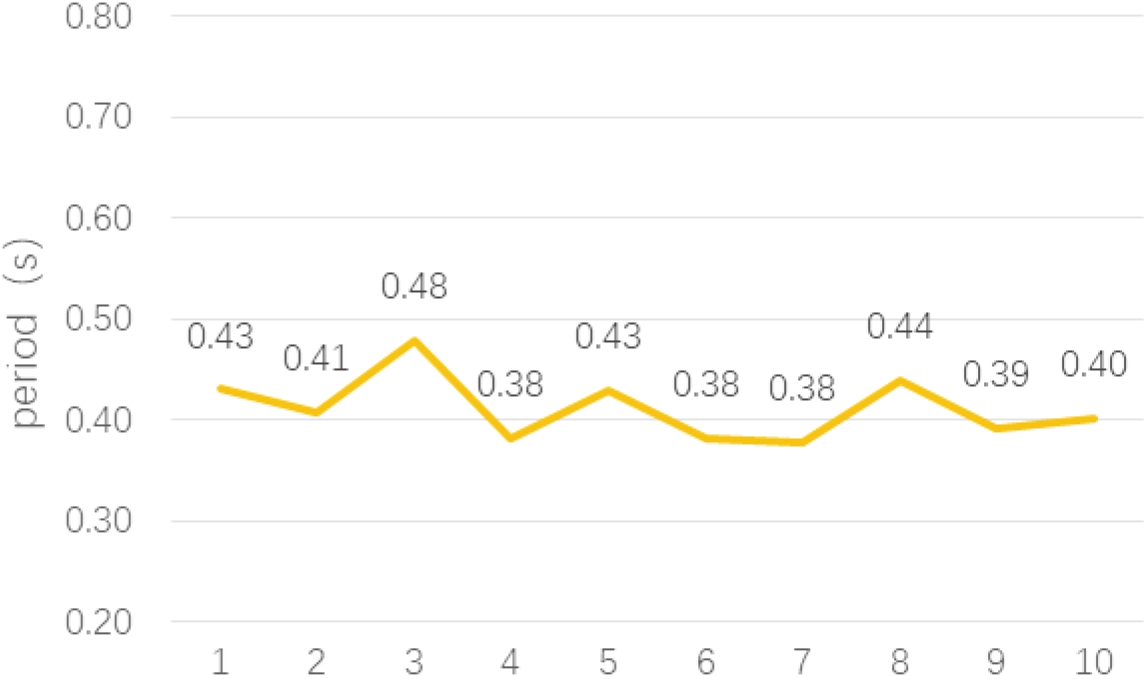
3.3Method frequency and period diagram
Figures 3 and 4 show that there was a little difference in the manipulation frequency and cycle of the Ding’s rolling manipulation among the 10 doctors. The frequency was mainly concentrated at 120–160 times/min, and the cycle was stable at about 0.4 s, which was consistent with the frequency and cycle parameters of the Ding’s rolling manipulation in previous studies [9, 11, 12, 13].
4.Discussion
The Ding’s rolling manipulation is a new type of Tuina manipulation technique created by Ding Jifeng, a famous Tuina manipulation professional, based on inheriting the characteristics of softness and continuity of the “one finger zen Tuina” and expanding the stimulation surface of manipulation [14].
Different doctors explain the Ding’s rolling manipulation from different angles. Combined with the results of this test, the following findings were obtained:
4.1Uniformity of Tuina manipulation
Xu [15] considered that the uniformity and permeability of the method is reflected in the rhythm of the manipulation and the uniformity of the force in intensity and space-time. The rhythm refers to that the manipulation frequency should be maintained at 120 times/min. In terms of intensity, it refers to the force applied in the different periods of the manipulation force should be uniform and the dispersion should be small. In terms of space-time, it is reflected in the distribution of force. If the maximum force of the manipulation appears earlier, it will not make the patient feel an uncomfortable “impact” feeling.
Jie [16] proposed a method to detect the characteristics of the action signal of the method from the similarity of the period and waveform to the similarity of the approximate period signal. After relevant research, it was considered that this method could be used as a quantitative index to judge the uniformity of the Tuina manipulation. The frequency of the method measured in this study was 120–160 times/min, and the visual display in the form of image in Fig. 2 shows that the periodic change of the expert manipulation was uniform and regular.
4.2Characteristics of “penetration” and “softness” of Tuina
At present, the academic circles mostly discuss “deep penetration” and “soft” from the technique frequency. Xie [17] proposed that the frequency band of the component force of the method was mainly concentrated at the range of 2 Hz–15 Hz, mainly low-frequency force, reflecting the “soft” characteristics of the method.
The study on the energy distribution of each frequency band of the rolling manipulation method force based on wavelet transform further proves that the rolling manipulation force was mostly concentrated in the low frequency band [18]. Sun [19] showed that the low-frequency vibrations made the manipulation more permeable. In a similar study [20], it was noted that there is an infrasound in the human body, and the biological resonance effect occurs at a frequency similar to or equal to the infrasound in the body [21].
The manipulation frequency should be maintained at the range 2–3 Hz, that is to say, it is better to keep the method at 120–160 times/min [25]. However, in the recent years there was no relevant research on judging whether a technique produces “deep” and “soft” effect, so this was another important focus of the present study. From the results of the present study, we believe that “deep penetration” and “softness” could be related to the stability and uniformity characteristics of the rolling manipulation. Effects of “deep penetration” and “softness” could be achieved at the same time when a stable force is maintained well. Nevertheless,this finding needs to be further studied in combination with clinical dose-response trials.
4.3“Powerful” characteristics of Tuina
A previous study showed that the manipulation acts on the body surface in the form of force [23], but the specific “force” required by the manipulation of is still inconclusive.
Previous studies [9, 10, 22] have found that, due to the different measurement methods, the measured force values were not similar. At present, there are no standards on the specific force value of “powerful” in the academic circles. In this study, data of the manipulation that was used on the subjects was collected in real time, and the force value was at the range of 0.70–0.85 kg, which was different from the previous studies (force value of 3–6.6 kg). The reason for this difference may be that the glove measuring device used in the subjects was measured in real time, which reflects the specific process of clinical practice that is much more similar to the real situation, while most of the previous studies were carried out on the model machine. From the characteristics of Ding’s rolling manipulation, the specific requirement was to focus on the side of the dorsal hand near the little finger. From the actual observation, it was difficult to achieve a force of about 5 kg. Therefore, the force value results of this study were closer to the actual situation than to the previous studies, and the force value results obtained were relatively better than previous studies. The results of this experiment reveal the nature of Ding’s rolling manipulation in terms of force, and this point deserves a further in-depth discussion by professionals.
In addition, this study found that the data of force applied of most experts was stable in a range, but the force value of some experts at ai6 was high. Combined with the dispersion analysis of ai6, it was found that the manipulation at ai6 fluctuated greatly. It can be possible that some doctor’s manipulation may gradually produce their own unique force application skills due to years of practice, which further proves the importance of quantifying the characteristics of old experts’ manipulation for future inheritance.
4.4Details of manipulation
This study not only realized the real-time measurement of relevant parameters in vivo, but also studied the difference in the force value when operating manipulation on different parts of the body. This is conducive to the further study of the technical details of the method.
(1) Based on the holistic thinking, in this study the peak value was regarded as the forward swing and the minimum value was regarded as the back swing. Through comparison, it could be considered that the force applied by the forward swing and the back swing were different, which proves that the rolling manipulation force value changes dynamically.
(2) Based on the consideration of the force surface, this study proposed the lateral and dorsal sides of the hypothenar were analyzed at the same time, and corresponded to channel groups – ai1 and ai4, ai2 and ai5, ai3 and ai6, one by one. It was found that the peak value, minimum value and average value of ai1 and ai6 was greater than the corresponding surface, and the difference was statistically significant.
Considering that the manipulation region that contacts with the skin needs to be pinned during the whole process, it can be considered that there were two pin points, ai1 and ai6 respectively. The peak value of ai2 was less than ai5, which had no statistical significance. The minimum value and average value of ai2 was greater than ai5 and exhibited a statistical significance. Based on the differences of human anatomy or force application habits, some doctors have a larger force when swinging back to ai2, which could be related to the bulge of the body part.
(3) In order to observe the stability of force application on different surfaces, ai1–3 and ai4–6 were sorted, respectively. The peak values followed the order: ai1
5.Conclusion
Based on the findings of the above study, it can be concluded that:
⟀ The force waveforms, peaks and minimum of each detection point alternated regularly, and the force values of the front and back pendulum waveforms varied significantly with small differences in waveform height. ⟁ The Tuina force values of the experts were concentrated in the range 0.70–0.85 kg, the frequency was concentrated at 120–160 times/min, and the period was about 0.4 s. ⟂ The peak, minimum, and mean values of the ai1 channel were greater than the ai4 channel, all of which were statistically significant (
The results presented in the present study also show the importance of quantitative research. However, as this study is still in the basic research stage, it can only provide a reference for the force generation and retraction of the method in the manipulation of swing out and swing back. Through the results of this study, we believe that it is difficult to describe the characteristics of the inheritance and understanding of experts’ manipulation comprehensively and objectively purely from text narration. Therefore, by applying the combination of medicine and engineering in a more realistic clinical application process, quantitative research on the manipulation of Tuina manipulation of experts’ doctors will be the basis for the inheritance and development of Tuina manipulation. As a result, the objective study of expert Tuina manipulation must be based on real clinical processes, and the results of the present quantitative study can present the quantitative characteristics of the experts’ manipulation and the details of the manipulation process. Thus, the quantitative study of the Tuina manipulation parameters will surely pave a way for the transmission and development of the experts’ manipulation.
Acknowledgments
This research was supported by National Key Research and Development Plan Key Special Project of Modernization of Traditional Chinese Medicine (2018YFC1707801) and the National Key Research and Development Program Topics (2018YFC1707703).
Conflict of interest
The authors have no conflicts of interest to declare.
Ethics statement
Research experiments conducted in this paper with humans were approved by the Ethical Committee and responsible authorities of our research organization following all guidelines, regulations, legal, and ethical standards as required for humans or animals.
References
[1] | Yang YB. Effect of Tuina on acute lumbar disc herniation. China Prac Med. (2020) ; 15: (36): 140-141. |
[2] | Sun YN. Observation on the clinical effect of needle embedding combined with head and neck Tuina on insomnia with deficiency of heart and spleen. Contemporary Medicine. (2021) ; 27: (02): 167-168. |
[3] | Wang XY, Ll HN, Zhang W, Sun Q, Wang JG, Ma F. Key factor in the globalization of manipulation: Standardization of manipulation. China Journal or Traditional Chinese Medicine and Pharmacy. (2020) ; 35: (04): 1658-1662. |
[4] | Liu YC, Lv J, Li JL. Research progress in quantification and standardization of tuna manipulation. Hunan Journal of Traditional Chinese Medicine. (2016) ; 32: (11): 205-207. |
[5] | Lv J, Xu J, Llu Y, Zhang YH, Nie ZC, Cao JF, Zhou N, Lv Q. Research on quantitative evaluation method of stability and similarity of traditional Chinese rolling manipulation. Academic Journal of Shanghai University of Traditional Chinese Medicine. (2021) ; 35: (02): 32-37. |
[6] | Huang CH. Clinical Study on the Evaluation of the Effect of TaiChi Tuina on Chronic Non-specific Neck Pain Based on MyotonPRO Digital Muscle Function Assessment System. Hubei University of Chinese Medicine. (2020) . |
[7] | Wang GC. Tuina manipulation. China traditional Chinese Medicine Press. (2003) ; 23-24. |
[8] | Zhu M, Gu X, Peng J, Chen L. Strength in Various Directions and Frequency of Rolling manipulation. Journal of Hunan University of Chinese Medicine. (2017) ; 37: (05): 523-525. |
[9] | Zhang H, Yan JT, Ma HS, Men ZT, Tong XJ, Miao ZJ. Study on Optimizing Dynamics Parameters in Activating Vital Energy and BloodCirculation Effects of Ro1ling Manipulation in Chinese Tuina. Chinese society of traditional Chinese medicine Tuina branch. The 9th Tuina academic annual meeting of Tuina branch of Chinese Academy of traditional Chinese medicine and the paper compilation of continuing education project of Tuina branch of Zhejiang Academy of traditional Chinese medicine Chinese society of traditional Chinese medicine Tuina branch: Zhejiang science and Technology Association. (2006) ; 6. |
[10] | Ma HS, Zhang H, Tong XJ, Yan JT, Miao ZJ, Men ZT. Optimized dynamics parameters of rolling manipulation in Chinese Tuina. Chinese Journal of Clinical Rehabilitation. (2006) ; (12): 1116-1118. |
[11] | Hu L, Yang Y, Zhang J. Design and implementation of Tuina data glove system based on pain threshold. International Industrial Electronic Center, Hong Kong. Proceedings of 2011 International Conference on Biomedicine and Engineering (ISBE 2011 V3). International Industrial Electronic Center, Hong Kong: Intelligent information technology application society. (2011) ; 6. |
[12] | Wang GC, Bi YS, Zhang SF, Yi ZC. Typical dynamic curve and preliminary analysis of manipulation of different styles of manipulation: Pushing manipulation, rolling manipulation, internal skill, Point tapping. Journal of Shandong University of Traditional Chinese Medicine. (1982) ; (03): 66-72. |
[13] | Zeng GN, Li Y, Li YK. Study on dynamic pressure characteristics of Tuina if the rolling manipulation. Jiangsu Journal of Traditional Chinese Medicine. (2011) ; 43: (05): 67-69. |
[14] | Yueyang Hospital of integrated traditional Chinese and western medicine affiliated to Shanghai University id traditional Chinese medicine Ding rolling manipulation School inheritance research base. Shanghai Journal of Traditional Chinese Medicine. 2019-07-19(009). doi: 10.28722/n.cnki.nshzy.2019.000249. |
[15] | Xu SX, Li XA, Chen SJ. Time domain analysis of Tuina force swing like method time domain analysis of Tuina manipulation force of swing type rolling manipulation. Journal of Applied Biomechanics. (1997) ; (01): 25-29. |
[16] | Lv Jie, Cao JF, Fang L. A new method for evaluating the similarity Of approximate periodic signals and its analysis of uniformity of rolling manipulation. Academic Journal of Shanghai University of Traditional Chinese Medicine. (2010) ; 24: (06): 54-57. |
[17] | Xie ZY, Xu SX, Li XA. Frequency domain analysis on the application of swing type rolling manipulation. Journal of Applied Biomechanics. (1996) ; (04): 208-211. |
[18] | Lv J, Cao JF, Fang L, et al. Energy analysis of force signal of rolling manipulation based on Wavelet Transform Energy analysis of rolling manipulation force signal based on wavelet transform. Journal of Applied Biomechanics. (2010) ; 25: (06): 439-443. |
[19] | Sun Wq, Yan JT. Tuina manipulation theoretical and experimental study on frequency. Chinese Manipulation and Rehabilitation Medicine. (2002) ; (05): 2-4. |
[20] | Chen JZ. Production and biological effects of infra-sound. Neural Injury and Functional Reconstruction. (1999) ; (01): 9-14. |
[21] | Li ZY, Yan JT. A preliminary study on the mathematical and physical basis of manipulation penetration. Chinese Manipulation and Rehabilitation Medicine. (1998) ; (01): 7-8. doi: 10.19787/j.issn.1008-1879.1998.01.003. |
[22] | Zhou XW, Jin WD, Zhu L. Experimental observation on the influence of different frequency, intensity and action time of Ding rolling manipulation on hemodynamics. Shanghai Journal of Traditional Chinese Medicine. (1998) ; (06): 42-44. |
[23] | Fang M, Song BL. Tuina. Beijing: China traditional Chinese Medicine Press. (2016) . |
[24] | Din JF. Tuina Dacheng. Zhengzhou: Henan science and Technology Press. (1994) . |
[25] | On the “forcefulness” of manipulation and its dialectical application. Chinese Manipulation and Rehabilitation Medicine. (2004) ; (04): 8-10. |


