
Designing next-generation cyber-physical systems: Why is it an issue?
Abstract
Cyber-physical systems (CPSs) are seen as one of the tangible results of the convergence of advanced information technology, nanotechnology, biotechnology, cognitive science, and social science in addition to conventional systems science, engineering, and technologies. Designing next-generation cyber-physical systems (NG-CPSs) is a challenging matter for abundant reasons. It is not possible to consider all reasons and to address their interplays simultaneously in one paper. Therefore, this position paper elaborates only on a selected number of topical issues and influential factors. The author claims that the shift of the paradigm of CPSs and the uncertainty related to the paradigmatic systems features of NG-CPSs are among the primary reasons. Since the future of CPSs will be influenced strongly by their intellectualization, adaptation/evolution, and automation, these aspects are also addressed. It is argued that interaction and cooperation with NG-CPSs should be seen from a multi-dimensional perspective and that socialization of NG-CPSs needs more attention in research. The need for aggregation, management, and exploitation of the growing amount of synthetic systems knowledge produced by smart CPSs is seen by the author as an important emerging concern.
1What is this position paper about?
1.1Objectives, approach, and contents
The objective of this position paper is to cast light on the state and implications of the digital transformation and convergence of humans, systems, technologies, design, and processes in the domain of cyber-physical systems. It is assumed that not all readers of this anniversary special issue of the Journal of Integrated Design and Process Science are specialized researchers, developers, or managers of this discipline. Therefore, the discipline of CPSs is first introduced from a birds-eye view. This overview casts light on the fundamentals and summarizes the recent trends and achievements without bothering the reader with specific details of the technologies, theories, methods, tools, and implementations. Consequently, only some (subjectively) selected topics are included, which are considered relevant and important for the readership of the journal. The discussed trends are believed to have a strong influence on the design knowledge, development methods, and facilitating tools of next-generation cyber-physical systems.
This position paper blends the outcomes of the previous research work of the author, a multi-focal literature review, critical systems thinking, and philosophical and methodological speculations. Its overall character is investigative and tentative, rather than prescriptive or argumentative. The reasoning and argumentation meander through theoretical concepts and practical facts, but also include untested personal opinions. It is hoped that the addressed topics, including the white and grey spots of knowledge, indeed deserve attention, even a broader public debate. It is also expected that, towards a collective consolidation, follow-up works and discussions will extend the contents, resolve the open issues, provide more empirical and rational evidence, and rectify the factual slips and misunderstandings.
The next parts of this introductory section introduce and position the notion of cyber-physical systems (CPSs) on the wide palette of engineered systems, and provide a typology of the various types of definitions. The second section (i) addresses the paradigmatic shift represented by the subsequent generations of CPSs, (ii) proposes a generic functional model of CPSs, (iii) overviews the distinguishing features of CPSs, and (iv) touches upon the application opportunities of CPSs. The third section deals with the concept of smart CPSs, and the issues of run-time self-adaptation of NG-CPSs. The fourth section deals with additional three groups of issues, which are related to: (i) multi-dimensional cooperation with NG-CPSs, (ii) socialization of individual and collective NG-CPSs, and (iii) opportunities for utilization of aggregated synthetic system knowledge. Included in section five, the discussion and conclusion parts revisit the limitations in forecasting and offer some reasonable propositions. The list of references includes selected sets of seminal papers that underpin the argumentation of the author.
1.2Setting the stage for discussion
While systems science pushes the envelope of what is probable, systems design expands the envelope of what is possible (Ackoff, 1991), (Doyle et al., 215). The deep-going investigation of and the interplay between knowing the probable and making the possible have led to a novel paradigm of engineered systems that was dubbed as ‘cyber-physical systems’ (CPSs) (Wolf, 2009), (Horváth & Gerritsen, 2012). Many publications interpret CPSs as functionally and technologically extended embedded systems, or sophisticated implementations of Internet of things systems, or advanced mechatronics systems, or collaborative adaptive systems. The author sees CPSs as one of the early tangible results of the convergence and integration of advanced information technology, nanotechnology, biotechnology, cognitive science, and social science with conventional systems science, engineering, and technologies. The convergence is culminating in a new phenomenon which manifests in the fusion of bits, atoms, neurons, genes, and memes and is often referred to as the bits-atoms-neurons-genes-memes (BANGM) revolution (Horváth & Tavčar, 2022). The fact of the matter is that CPSs not only represent practical examples of the integration of bits and atoms in human and social contexts, but also contribute to the integration of neurons and genes in various industrial and non-industrial systems. The current trend of integration of neurons is exemplified by the emergence of cyber-biophysical systems (represented by assistive and corrective implants and artificial limbs/augmentations), while the results in the latter field are showcased by gentelligent systems and biological analogies-based smart systems.
As a distinct genre of intellectualized engineering systems, CPSs are seen both as drivers of the fourth industrial revolution (Ahmadet al., 2016), and as crucial resources for the implementation of the smart interconnected society (Colombo et al., 2017). One trait of these engineered systems, which distinguishes them from other genres of systems, is that they complementarily operate in the physical realm and in the cyber realm. It is a fact that the cyber world can gradually penetrate into the unanimated and animated natural worlds through various synergistic technologies. CPSs integrate signals and data obtained from dynamic and uncertain environment with data-driven software control, context-sensitive decision-making, and continuous physical changes (Gerritsen & Horváth, 2012). There will be a growing need, as well as numerous opportunities to utilize interacting CPSs, which are equipped with strong connectivity and collective problem solving abilities, both in the society and in the industry (Ansari et al., 2018). Extrapolating from the latest progression in the field of complex systems, the future will see a rapid proliferation of self-evolving CPSs (Weyns et al., 2021).
The science of cyber-physical systems is still in the stage of formation and the methodologies of doing supra-disciplinary research in this field have not reached further than their embryonic stage yet. Only few efforts have been reported in the contemporary literature concerning the development of comprehensive multi-disciplinary or trans-disciplinary theories. The fact of the matter is that, on the one hand, such theories are seen as a necessary means to reduce the notional and methodological uncertainties, but, on the other hand, practitioners question their usefulness from the viewpoint of supporting their practices. The publications concerned with theoretical fundamentals typically elaborate on domain theories to describe and explain: (i) system control, (ii) system modelling, (iii) system architecting, (iv) system communication, (v) system security, and so forth. It must be mentioned that the different conceptualizations and different vocabularies of the involved disciplines also create borderlines in collaboration and ambiguities in communication. For instance, Quadri et al., (2015) suggested that cyber-physical systems are next-generation embedded systems and explained this with the accelerated development of sensing, networking, and communication technologies. Considering the number of shared functions, other researchers argued that cyber-physical systems are not radically different from the Internet of things systems (Xu et al., 2018), or from the proactive digital twins (Koulamas & Kalogeras, 2018). These issues will be resolved in the rest of this position paper.
The CPSoS Consortium defined CPSs as complicated systems that exhibit the features of systems of systems, i.e., (i) large, often spatially distributed physical configuration with complex dynamics, (ii) distributed control, supervision, and management, (iii) partial autonomy of the sub-systems, (iv) dynamic reconfiguration of the entire systems on different time-scales, (v) continuous evolution of the systems during their operation, and (vi) possibility of emerging behaviours (CPSoS Consortium, 2015). A fact of the matter is that the majority of NG-CPSs will manifest as systems of systems (CPSoSs). An important operational principle of CPSoSs is a holistic system-level control (SLC) (CPSoS Consortium, 2016). It means: (i) a system-wide “orchestration” of the constituting actors (components, sub-systems, and/or member systems) that provide services independently in order to achieve the optimum performance of the overall system, and (ii) providing time- and context-dependent information and resources for the individual actors to manage and complete their tasks (Xin et al., 2015). More often than not, a holistic SLC cannot be performed in a completely centralized or hierarchical (top-down) manner, with one authority tightly controlling and managing all of the sub-systems and components (Díaz et al., 2016).
1.3Definition of cyber-physical systems
Almost 60 years ago, Ackoff wrote: “The situation the world is in is a mess” (Ackoff, 1964). I think his observation is valid even in our current days –in particular, in the context of definitions of cyber-physical systems. The observed perplexed situation has been created partly by the huge differences in the interpretations of the notion of CPSs, and partly by the fact that it is one of the most rapidly changing fields of system engineering (Engell et al., 2015). This latter also demonstrates that “the essence of all systems is change”. In addition to this,“the way we look at systems in conjunction with what there is determines what we see”, as Kampis (1991), argued. For these reasons, finding a shared, comprehensive definition of CPSs is not as obvious as it seems at the first sight.
One of the first definitions, introduced by Lee (2007), claimed: “cyber-physical systems are integrations of computation and physical processes”. Over the years, several more articulated definitions were proposed that could be classified into five categories, namely (i) augmentative, (ii) descriptive, (iii) normative, (iv) predictive, and (v) symbolic definitions. The augmentative definitions express in which sense CPSs are more than other comparable (more traditional) systems. That is, starting out from the characteristics of systems such as embedded systems, real-time systems, network-based systems, etc., they identify the characteristics which distinguish CPSs from the mentioned other system categories. An example is the definition formulated by Marwedel, P. that posited that cyber-physical systems (CPSs) are embedded systems (ESs) plus (dynamic) physical environment (PE), that is CPSs = ESs + d (PE) (Marwedel, 2021). The simplest explanation of the appropriateness of this definition is that sensors, actuators, and processors are often embedded in the physical parts of these systems and in the direct environment. The descriptive definitions try to bring all (or at least a large number of so far experienced) common characteristics of CPSs into an exact holistic formulation in a specific context. A typical descriptive definition is: “In a cyber-physical system, a physical mechanism is controlled or monitored by computer-based algorithms, the physical and software components are deeply intertwined, able to operate on different spatial and temporal scales, exhibit multiple and distinct behavioural modalities, and interact with each other in ways that change with context” (Putnik et al., 2019). The normative definitions intend to capture that minimal set of criteria that specific implementations of CPSs should meet in order to be regarded as such. A typical normative definition claims that CPSs are supposed to: (i) manifest as complicated networked multi-actor systems, (ii) implement multiple sensing-reasoning-learning-adapting loops, (iii) be realized normally as synergistic system of systems, (iv) be tailored to service provisioning and dynamic resource management, and are characterized by (v) deep penetration into real-life physical processes, (vi) use data and patterns driven cyber-physical computing, (vii) capability to exploit a growing level of system intelligence, and (viii) provide benefits in applications in human, social, and industrial contexts (Horváth, 2014). The predictive definitions include abstractions or projections to forecast distinguishing characteristics of future (next-generation) CPSs (Dumitrache, 2010). Used in systems science and systems theories, symbolic definitions create canonical models or constructs in order to capture the essence of a family or instance of a CPS using logical, mathematical, and information technological means (Togay, 2014). Due to the fast pace of technological innovation, the main paradigms still used in automation and control have not been able to keep up with the progress in many domains, e.g., computer science, artificial intelligence, social science, and cognitive engineering (Thompson et al., 2015).
2System paradigms, functions, and features
2.1Shifting paradigms of cyber-physical systems
The continuing scientific, technological, and conceptual developments lend themselves to an irresistible general change in the paradigm of CPSs (Checkland, 1991). This is an important issue since a given paradigm defines a sharable pattern for design, implementation, operation, and servicing of systems, as well as the way of looking at them from theoretical and practical dimensions (Gunes et al., 2014). There is a bidirectional relationship between the rational shift of the paradigm and the emergence of system features. The shift enables paradigmatic novel features, whereas profusion of novel features leads to culmination of a paradigm. In practice, the paradigmatic change is reflected by the observable sophistication of the design, implementation, operation, and servicing approaches, as well as by the enrichment of functionality, system features, operational characteristics, and the performance indices of the realized systems (Muccini et al., 2016).
It is a relevant question what general principles guide the formation of the paradigm of CPSs and cause the appearance of the paradigmatic features? A reasoning model was proposed which assumed that, like the human society, CPSs are evolving through generations (Horváth et al., 2017). The logic of this model is underpinned by the observation that, although the evolution is continuous, some epochs can be differentiated based on the aggregation of disruptive changes. The abstract concept of generations is associated with these epochs. As a structural term, ‘generation’ has been formally defined as a ‘technological/engineering cohort’ of different manifestations of CPSs that reflects the genotypic features of the ancestor systems, but deviates from them in terms of their phenotypic features. This is the essence of the paradigmatic shift. As empirical indicators of the paradigmatic shift, two measures have been considered in a reasoning model: (i) the continuous increase of the level of self-intelligence, and (ii) the growing capabilities for system-level self-organization. As shown in Fig. 1, these two measures made it possible to identify five generations of CPSs.
Fig. 1
Subsequent generations of cyber-physical systems.
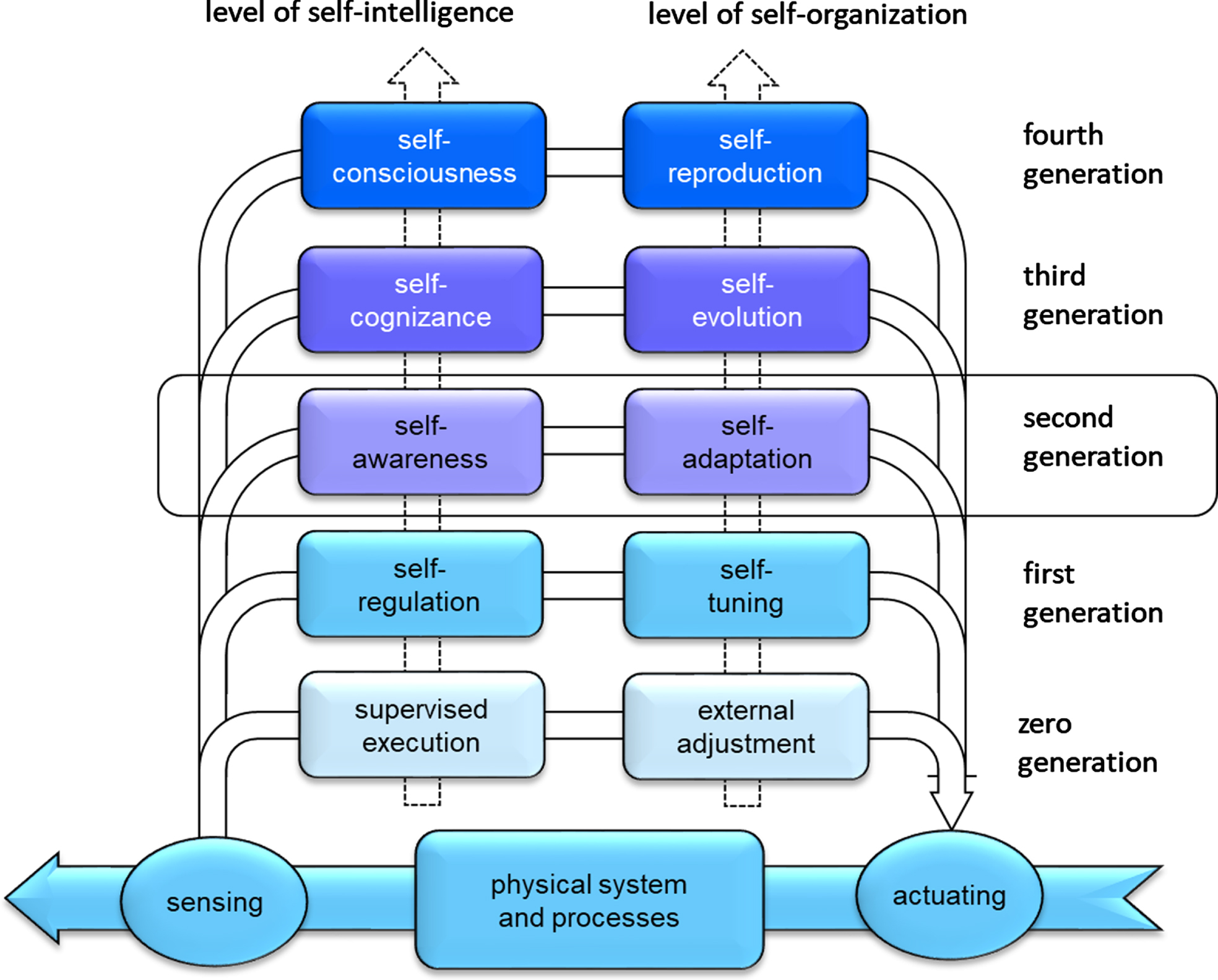
As zero-generation of CPSs (0G-CPSs), look-alike engineered systems and partial implementations of CPSs have been considered. The majority of the industrial 0G-CPSs is the result of incremental digital augmentation of transformational systems. They are functionally and architecturally closed systems and do not lend themselves to any run-time variation. They typically consist of one or more traditional plant type or monolithic artefacts-type physical sub-systems (such as robots) and are controlled by pre-defined closed-loop control and/or pre-programmed optimization sub-systems (Nikolakis et al., 2019). The representatives of first-generation CPSs (1G-CPSs) are systems equipped with self-regulation and self-tuning capabilities.1G-CPSs are closed, software integrated systems. Typically, they include a network of sensors that measures the parameters of the physical processes and various software mechanisms that generate data for driving the actuators affecting the physical processes (Shein et al., 2012). Their feedback-based self-regulation and self-tuning represent the lowest levels of system smartness and adaptation (Gerostathopoulos et al., 2019).
According to the discussed reasoning model, the second-generation systems are capable to operationalize self-awareness and self-adaptation (Elkhodary et al., 2010) (Brun et al., 2009). They are often referred to as smart CPSs. Multiple authors interpreted these systems as data-driven and virtual-simulation enhanced systems (Cai & Zheng, 2018) (Gabor et al., 2016). These systems represent the immediate next generation in the context of this position paper. The current research and publication confirms the correctness of assuming that the development of CPSs will go through this stage (Delicato et al., 202020-Jun-22). Perhaps, the most frequently occurring research questions in the contemporary literature are: (i) What does system smartness mean in the context of CPSs?; (ii) How can computational mechanisms and knowledge-processing methods of artificial intelligence be used to increase the intellect of CPSs?; (iii) What does self-supervised self-adaptation mean in the context of CPSs?; and (iv) How can CPSs be made capable to obtain awareness, to learn and make decision on the needed adaptation, and to supervise the entire adaptation process? (Bures et al., 2018). Various frameworks have been proposed for managing the decision-making processes (Zhou et al., 2017). Application-orientated system-level reasoning mechanisms and synthetic system knowledge are seen as indispensable enablers of implementation of smart CPSs (Håkansson et al., 2015).
Evidently, it is always difficult to conceive the future of smart CPSs (Good, 1966), but it is highly probable that they will advance and grade to varying degrees (Wognum et al., 2017). Behind assuming the probable emergence and existence of a third-generation of CPSs is that intellectual and organizational capabilities of CPSs are not all-or-none properties. Müller (2017) expressed the opinion that “it is expected that the cyber-physical systems revolution will be more transformative than the IT revolution of the past four decades”. Considering the trends and forecasts, it can be assumed that the third-generation CPSs shall feature higher-level cognitive capabilities and advanced resource management both for evolutionary autonomous adaptation and for insightful application problem solving (Vijayakumar et al., 2017). What may trigger the progress towards cognizant or intelligent systems is the on-going trans-disciplinary knowledge and technology integration (Cosier & Whittaker, 2001). An example is the so-called synergistic technologies, exemplified by tangible bits (Ishii & Ullmer, 1997). Eventually this may lead to the aforementioned convergence of bits, atoms, neurons, genes, and emotions, and may offer radically different system affordances and application opportunities (Ma et al., 2015).
The 3G-CPSs can be expected to possess self-cognizance and self-evolution capabilities. While system awareness is the result of the potential of a system to dynamically and effectively build a restricted world model in a not predefined situation, cognizance is supposed to enable it to develop multiple (but a restricted number of) world models of the external world from various (independent or interrelated) perspectives and to work according to them. Self-evolution will make it possible to move from one stable system arrangement to another one and from one multi-functionality state to another, in response to the self-recognized changes in the goals, potentials, resources, environment, and rationality.
The far future is less certain. As of today, literally intelligent CPSs (I-CPSs) cannot be seen on the horizon yet, in spite of the fact that the term ‘intelligent CPSs’ is already quite frequently used in the related literature (Castro et al., 2019). Such systems can actually be put into the position of enablers of Industry 5.0 (Cogliati et al., 2018) and smart socio-technical environments (Zhuge, 2011). It cannot be judged if it is a realistic vison or just the influence of the observed lack of a uniform terminology and correct definitions. I-CPSs are usually assumed to: (i) make (critical) decisions autonomously (without human supervision or intervention) based on novel, abstract, uncertain, and/or incomplete information, (ii) create, propose, maintain, and devote values and perform value-based decisions on that they or other systems have created, (iii) define new objectives, reprogram themselves, acquire proper knowledge, and resolve their operational conflicts even if only imperfect information is available, and (iv) reproduce themselves and maintain their operation in situations that were not foreseen at the initial implementation of these systems and thus were not part of the original design intentions.
Acceptably, the debate on intelligent CPSs is a really complicated matter since not only scientific, technological, engineering, economic, and cognitive issues are involved, but also philosophical, teleological, ethical, social, political, and mystic ones (Shabbir & Anwer, 2018). The author is of the opinion that it is meaningless to call 4G-CPSs intelligent unless they have reached the level of intelligence, autonomy, symbiosis, and sociality that is comparable with that of creative and socialized human individuals and human communities. Considering all uncertainties, the best compromise seems to believe in hybrid intelligence (Dellermann et al., 2019a). It has been defined by Dellermann et al. (2019b) as “the ability to achieve complex goals by combining human and artificial intelligence, thereby reaching superior results to those each of them could have accomplished separately, and continuously improve by learning from each other”.
2.2Different approaches to functional design
Many authors identified computation, control, communication, and actuation as the general (main) functions of all CPSs (Talsania et al., 2017). However, as always, the devil hides in the details. Using their analogue and digital hardware, system-level, middleware, and application software, and low-level and high-level cyberware, CPSs deliver a wide variety of application specific functionality (Chen, 2017). The fact is that the functionality of the 1G-CPSs and 2G-CPSs is incomprehensibly rich, primarily determined by their intended purpose (the applications), and the engineered operations (the realizations) (Iglesias et al., 2017). From a birds-eye view, the thinking process concerning the functionality of a new or adapted system goes through the elaboration on (i) the purpose, (ii) the functions, (iii) the operations, (iv) the interactions, and (v) the behaviours (Wang & Haghighi, 2016). This logical flow corresponds to the semantic transitions from a design brief to prototype testing in the design process.
Hardware development for CPSs reflects the routine of electromechanical design and engineering (Isermann, 1996). Being the driver of developing systems, specification of the purpose involves an informal, textual description of the goals and constraints to be considered, and is followed by a comprehensive requirement engineering. Based on this input, symbolic or qualitatively parameterized functional models are devised. Functions are abstract (implementation independent) conceptualization of the intended of operations. They are represented by qualitative, quasi-formal descriptions as textual, visual, and/or hybrid structures. Hierarchical decomposition of the functions is prevailing. Operations are idealized implementations of functions, and they are formally represented by quantitative mathematical models with N number of parameters, where N << ∞. Behaviour is manifestation of the operations and the interactions of the actual system implementation in a real-life dynamic environment, which is triggered by the intended effects, as well as by the unintended ones. Behaviour is observable and measurable, and can be captured quantitatively but only up to a certain level of articulation since it is governed and can be characterised only by an infinite number of parameters and values (Escobar et al., 2017).
Conventional software engineering process goes through (i) purpose, (ii) concept, (iii) mechanisms, (iv) notation, (v) usage, and (vi) maintenance stages (Ross et al., 1975). Software development for CPSs is usually conducted according to the software development life cycle (SDLC) strategy or to the various implementations of the V-model (Ayerdi et al., 2020). The SDLC strategy involves (i) goal analysis and planning, (ii) requirements engineering, (iii) architecture specification, (iv) component implementation/adaptation, (v) component prototyping, (vi) system integration, (vii) operation testing, (viii) installation and deployment, and (ix) maintenance and updates. The central activity of SDLC is architecting that allows both distributed task allocation and parallelization. According to Zheng et al. (2016), system-level modelling needs to include (i) modularization, (ii) interfacing, and (iii) integration activities. However, the common realization of the V-model does not extend to a direct integration of physical components and computational components. Having recognized this, Grimm et al., (2014) proposed an extended approach that considers six abstraction viewpoints: (i) requirements, (ii) functional, (iii) logical, (iv) technical, (v) stakeholder, and (vi) behaviour, and four levels of abstraction: (i) phenomenon, (ii) approximation, (iii) mathematical, and (iv) computing.
Software implementation in the physical realm is realized by static (pre-defined plant-type) architectures, variable (configurable in operation) architectures, or (iii) dynamic (run-time constructed) architectures (Wolf & Feron, 2015). In the present time, the traditional waterfall model has been replaced by the concept of agile software development (Dybå & Dingsøyr, 2008), or the iterative scrum approach that takes care not only of higher flexibility but also of a broadly-based stakeholder involvement and monitoring (Schwaber & Beedle, 2002).
Owing to its different objectives, resources, subjects, and approaches, formal specification of cyberware development is somewhat complicated (Strube, 1992). It spans from data warehousing through big-data management to ontology development, just to mention some core activities (Jones et al., 1995). The knowledge-engineering process usually consists of the following stages (i) identification of the task, (ii) aggregation of the related intellect and knowledge, (iii) decision on the vocabulary and representation of knowledge constructs, (iv) specification of knowledge constructs, (v) encoding problem instances, (vi) testing queries and inference procedures, and (vii) debugging the knowledge structures. Various layered frameworks and schematic architectures have also been proposed with semantic interpretations of the various levels and the application-oriented offerings (services) (Wang et al., 2013).
Due to the above-discussed methodological threads and differences, designing CPSs is often viewed as a multi-cultural undertaking, particularly with regard to functional design. In spite of the differences, there is one commonality in hardware, software, and cyberware design, namely, that they are model-based. This lends itself to possible higher-level process integration and contents synthesis (Chu & You, 2015). On the other hand, multi-disciplinary co-design frameworks for CPSs including integration of domain models, human factor analysis, safety and security investigations, economic consideration, environment impact analysis, and sustainability issues are still scarce (Özbek, 2020). They may be associated with various conceptual frameworks (Dumitrache et al., 2017). The fact of the matter is that a functional model is the highest-level semantic abstraction that can represent the abovementioned constituents (Cheng et al., 2013). This serves as the basis of other down-streams models (Tan et al., 2008).
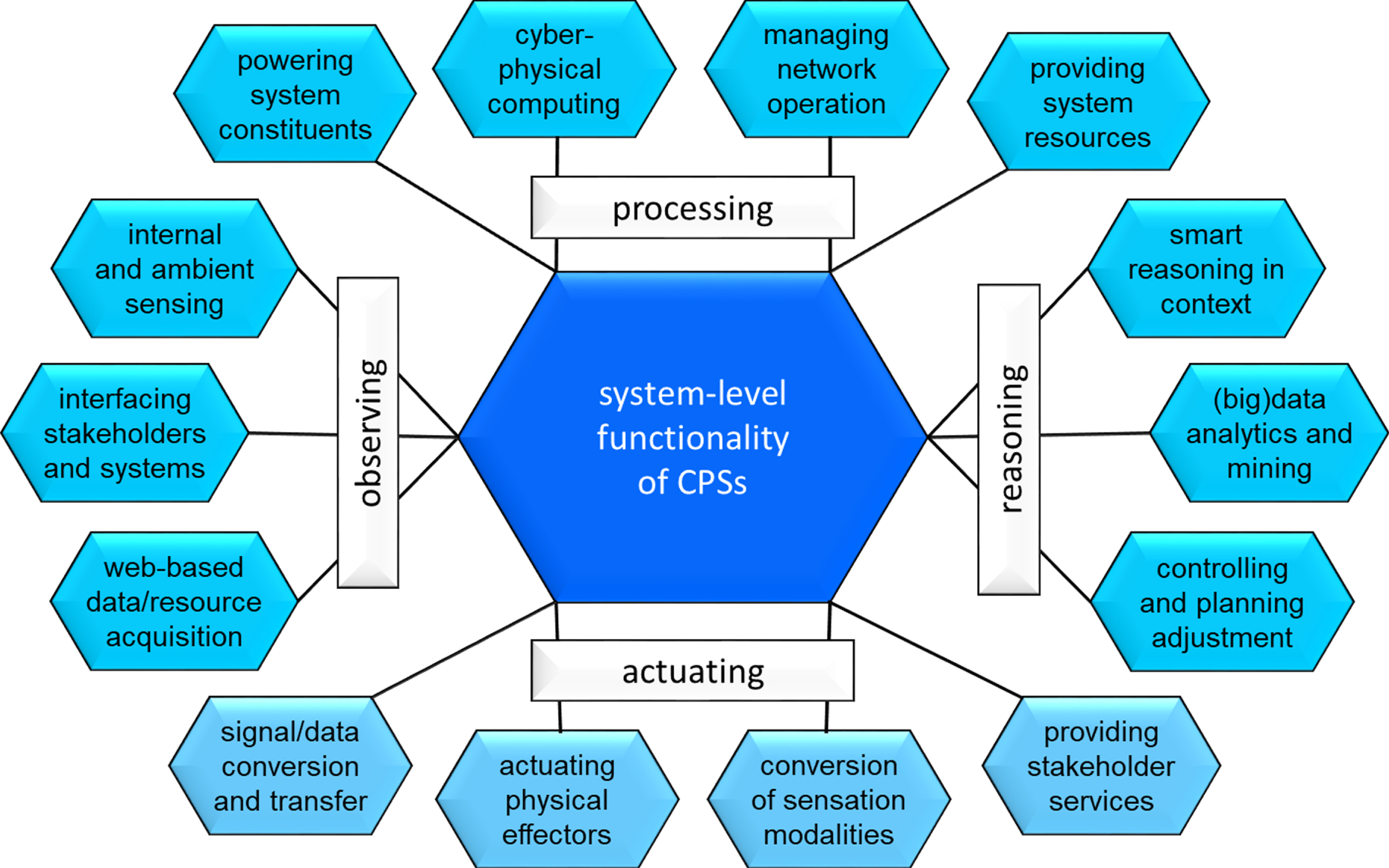
As an example, a system-level functionality model of CPSs is shown in Fig. 2. It identifies the main functions and primary sub-functions from a system organization point of view, rather than from the conventionally used material, energy, and information processing oriented perspectives. The four categories of sub-functions are related to: (i) observing and monitoring, (ii) material, energy and information transformation, (iii) computational reasoning, and (iv) actuating and servicing. Depending on the concrete applications, these sub-functions can be decomposed to numerous low-level operational functions and very different function carriers can be applied (Gerritsen & Horváth, 2012). This exposes the importance of solving integration, synergy, and compositionality issues (Sztipanovits et al., 2012). Towards this end, the self-managing potential of CPSs can be interpreted as a meta-function, which is present in self-managing systems through the specification of the supporting functions of their constituents and, thus, may not be needed to be specified explicitly (Kitamura & Mizoguchi, 1999).
Fig. 2
System-level functional model of CPSs from a computational perspective.
2.3Paradigmatic systems features
Many survey papers have made effort to interpret system features starting out from the CPS concept map first presented in (N.N., 2009) (https://CyberPhysicalSystems.org/CPSConceptMap.xml). For this reason, we are facing a somewhat confusing picture. For instance, Togay (2014) discussed the following features: (i) tightly integrated, (ii) heterogeneously networked, (iii) multi-aspect adaptability, (iv) automation capability, (v) non-functional requirements, (vi) distributed architecting, (vii) multidisciplinary engineering, (viii) limited resources, (ix) time awareness, (x) general dependability, (xi) predictability and determinism, and (xii) risk of casualties. Talsania et al. (2017) argued that cyber-physical systems are an opportunity for humans to get closer to nature by means of the cyber world or ubiquitous computation. Accordingly, they identified the following distinguishing characteristics: (i) closely integrated, (ii) cyber capability in every physical component, (iii) networked at multiple scales, (iv) temporal and spatial complexity, (v) dynamic reorganization and reconfiguration, (vi) high degree automation based on close control loops, and (vii) dependable and certified operation, most of which can be associated with cyber-physical computations. As features of smart systems, (i) multi-level cooperative openness, (ii) system-level reasoning and learning capabilities, (iii) system operation in dynamic contexts, (iv) semantic, pragmatic, and apobetic interaction, (v) self-supervised planning and adaptation, and (vi) ensuring multi-aspect depend ability were discussed in (Horváth, 2021). González Nieto et al. (2009) claimed that self-* properties are typical for so-called autonomic computing systems featuring self-organization and controlled emergence, and that meta-function governs the regular operations of CPSs.
Whilst the current literature shows inconsistencies concerning the paradigmatic systems features (PSFs) of 1G-CPSs and 2G-CPSs, it offers a quite coherent interpretation of the system and environment relationship. Based on the nature of their boundaries, CPSs are categorized as (i) closed (i.e. totally isolated), (ii) semi-bounded (partially open or nearly closed with respect to binding and containment), or (iii) open (exchange material, energy, data and intellect with its environment). Though every CPS has a logical and a physical envelope, an open system completely lacks a definitive boundary and loses its identity (Ahmadi et al., 2011). It overlaps with its environment, which explicitly or implicitly affects the system, while the system leaves its “footprint” on its environment. In principle, environment is everything else that is outside the system boundary (Xuesen et al., 1993). Eventually, the conjunction of the system actors and the environment actors determines its functionality (Horváth & Gerritsen, 2013).
With regard to timing, CPSs are modelled as: (i) static timed systems (Molina & Jacob, 2018), (ii) dynamic timed systems (Kang et al., 2012), and (iii) hybrid timed systems (Goebel et al., 2009). According to the values of the time variable, CPSs include (i) continuous time sub-systems and (ii) discrete time sub-systems. The former sub-systems are represented by interacting continuous-time dynamics models (i.e. modeled by differential equations) (Rao & Unbehauen, 2006), while the latter sub-system by discrete-event dynamics models (i.e. modelled by automata) (Schruben, 2000). In continuous time systems, the changes in the variables may occur at any moment of time in a given interval. In discrete time systems, variables can only change at ‘discrete’ moments of time. Typically, a hybrid system consists of a continuous state system and a discrete state system (i.e. the plant and the controller), and can be mixed time/event-triggered (Yao et al., 2016). Time-sensitive networking is an essential aspect of cyber-physical systems.
From an architectural point of view, three types of coupling of the constituents have been found typical in CPSoSs: (i) inter-systems (among the included systems), (ii) inter-sub-systems (among the cyber-physical sub-systems), and (iii) intra-sub-systems (among the cyber-physical components) (Trunzer et al., 2021). CPS architectures include (i) point-to-point (hub and spoke), (ii) federated, and (iii) integrated modular architectures, though the trends of research on architecting CPS are still unclear (Malavolta et al., 2015). CPSs feature within-system heterogeneity and between-system heterogeneity. CPSs can be composable and compositional. A composable system can be viewed in a reductionist way (i.e. can be fully understood by considering its constituents) (Wan et al., 2010), whereas a compositional system can only be understood as a whole (i.e. needs a holistic way of treatment) (Bakirtzis et al., 2021). Complexity is innate in many CPSs and, if we want to capture complexity, we must understand the inner workings of systems that give rise to certain properties and behaviour (holism, emergence, and compositionality), not forgetting about the context/surroundings of their workings that also helps identify the influencing factors and causalities (Zhang, 2014).
From an operational point of view, the operating states of CPSs are alignments of many indistinguishable ‘microstates’ and are associated with information and knowledge (Mainzer, 2014). CPSs can be linear (limited complexity with deterministic behaviours) or non-linear (boundless complexity with non-deterministic behaviours) (Goswami et al., 2012). Furthermore, as discussed earlier, CPSs can be ordinary, smart, cognizant, and intelligent from the point of view of the possessed knowledge and reasoning mechanisms. Behaviour of ordinary large-scale systems can be forecasted from low-level behaviour and properties. Simple local rules applied over a large scale can lead to complex behavioural patterns. Dynamic systems have complex internal structure and operate in a range of states, which may be far from equilibrium and lend themselves to emergence (Tyszberowicz & Faitelson, 2020). Large-scale complex CPSs may exhibit unforeseeable and unexpected behaviour (Kopetz et al., 2016).
In a given generation of CPSs, the distinguishing characteristics of the preceding generation may be preserved, modified or replaced by the novel characteristics of the given generation. Trivially, higher generation CPSs do have features that cannot be found in a lower generation. This process is referred to as the shift of paradigmatic system features (PSFs). In this view, PSFs are inherent, generic, and genre-associated characteristics of CPSs serving to (in principle, uniquely) identify them. In comparison with observable and/or measurable attributes and properties, PSFs are abstract qualities that can be found by reasoning (Carreras Guzman et al., 2020). They are also associated with novel technological possibilities and engineering principles. The variance of PSFs of real or abstract systems poses an intellectual challenge. Consequently, there are no experimentally evidenced theories of PSFs of CPSs, only arguments that hinge on intuitions and interpretations. However, these together make the related literature divided.
Towards a more obvious taxonomy of PSFs, the following generic assumptions can be used as a starting point: All systems are characterized by four foundational properties that can be used for identification: (i) the unity property, (ii) the hierarchy property, (iii) the identity property, and (iv) the equilibrium property. The unity property asserts that a system is a unique collection of components, which are more strongly bound to each other than to the surrounding environment. This property makes the boundary and the foundational rules of a CPS local. The hierarchy property states that a system is a hierarchical composition of stable constituents that are architecturally interlocked and operationally synergetic. This property makes a CPS “more than the sum of its parts” and eventually leads to compositionality through composability. The identity property declares that changes and conversions in material, energy, information, and intellect processing are the essence of the operation of all CPSs. This property allows identifying transforming, informing, reasoning, and hybrid type of CPSs (which produce outputs in the physical, digital or cognitive realms or in all of these).
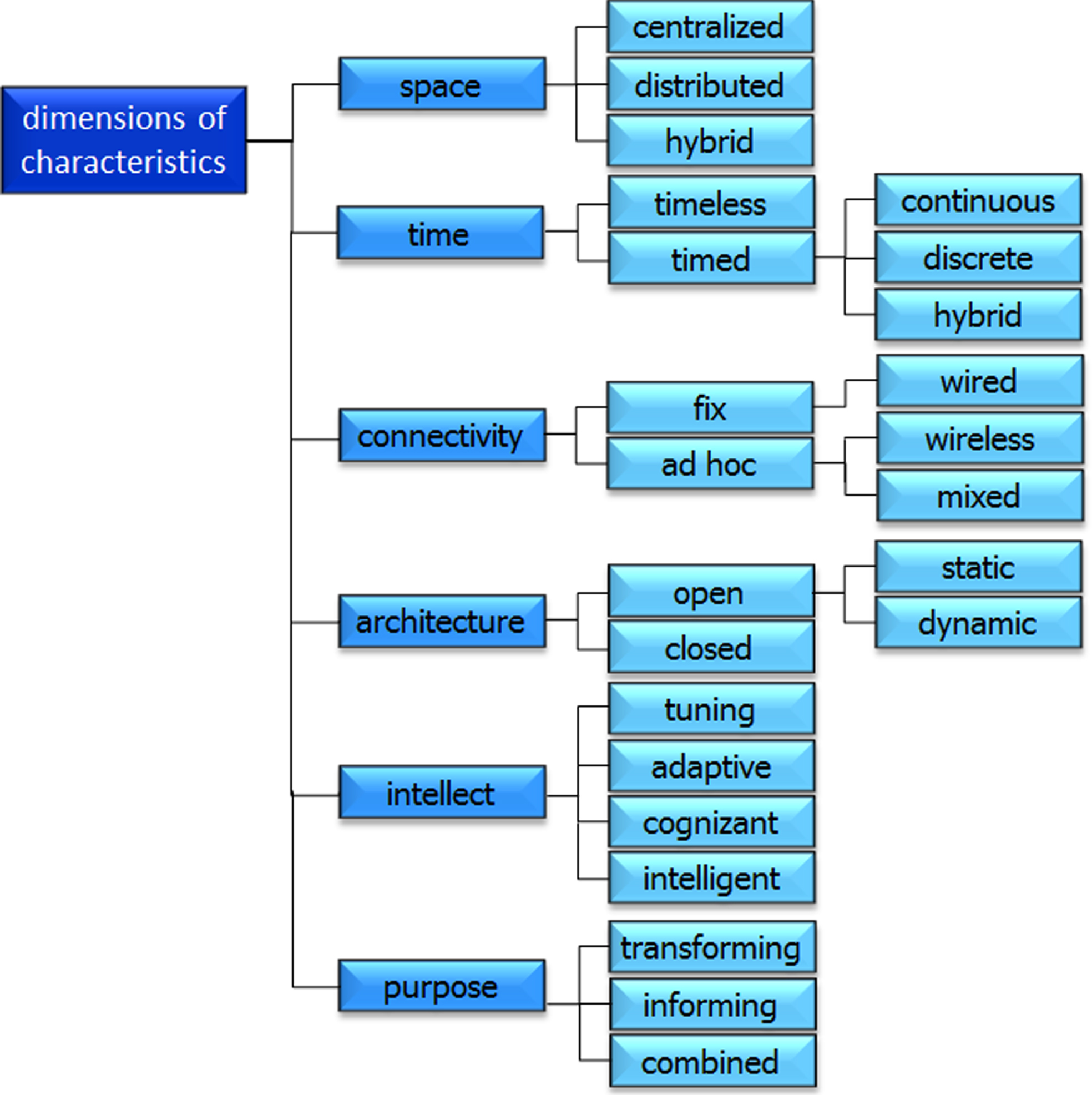
The equilibrium property claims that outputs of a system are in balance with its inputs (that is, the laws of conservation of mass and energy, and laws of distribution of information and knowledge apply). This property is associated with the embedding and interoperation of a CPS with its environment, as well as with the use of signals/data and resources, and efficiency, problem solving, supervision, and automation issues. The four foundational properties designate proper dimensions of generic characteristics, as shown in Fig. 3. The unity property designates existence in space and time. The hierarchy property is about connectivity and architecture. The identity property eventually concerns the intellect of operation. The equilibrium property is about the offerings (the benefits) of CPSs. Pourtalebi & Horváth (2016) assumed that PSFs could be derived based on these fundamental properties and principles, and can be separated from directly observable manifestation features (Romero et al., 2019). On the one hand, inventorying the PSFs of all generations of CPSs is challenging since it needs a retrospective analysis in the case of the existing generations and a predictive investigation in the case of the future generations.
Fig. 3
Dimensions of the generic characteristics of CPSs.
2.4Cyber-physical systems for everyone
First things first –this attention grabbing and thought provoking sub-title needs explanation. It does not want to say that every human being should possess one or more complicated and expensive CPSs in the near future, though smart cars, grass cutters, kitchen assistants, bathroom cleaners, stroke rehabilitators, autonomous learning aids, etc. are paving the road toward this end. Instead, what it wants to say is that everyone may and has to benefit from context-dependently tailored services of CPSs (Suh et al., 2014). The achievement of this objective has been made possible by the new affordances provided by the latest developments of the paradigm and technologies of CPSs (Wan et al., 2011). As argued above, next generation CPSs will manifest not only in the form of large-scale complex and plant-type industrial systems of systems, but also in socialized and personalized interconnected systems formed by interoperating smart actor nodes. As such, they will be able to (i) deeply penetrate into real life processes, (ii) collect massive amount of data, (iii) develop operation plans run-time, (iv) optimize their operations and services, and (v) adapt themselves to dynamically varying environmental circumstances or operational states, in addition to (vi) guaranteeing dependability, safety, and privacy.
The above-mentioned functionalities are becoming distinguishing characteristics of smart CPSs. It means that, in the case of such systems, it can be expected that the focus of design will shift from a functionality orientation to an affordance orientation. This can be underpinned by the fact that these systems, enabled by their smartness (problem solving knowledge and reasoning resources), will decide on transforming affordances into context-specific functions. Yamanobe et al. (2017) posited that the concept of affordance could be a key to realize human-like advanced manipulation intelligence, especially in unknown situations. In fact, only our creative phantasy and the technological and economic opportunities may constrain the varieties of systems that can be developed for exploitation of affordances in various non-industrial applications. The growing number of related publications evidences the interest in developing and studying such application systems. Many publications inform about the fact that the principles of system-in-the-loop (SitL) (Hartmann et al., 2017), and environment-in-the-loop (EitL) (Falkenberg et al., 2018), are gaining preference to human-in-the-loop (HitL).
Some novel computational mechanisms are needed for these implementations that can support: (i) identification of states/situations based on run-time sensed signals, (ii) recognition of state changes as events, (iii) inferring about existing situations, (iv) building awareness concerning the performance of the system and attaining its operation/servicing objectives, (v) devising alternative performance enhancement strategies by situation-sensitive reasoning, (vi) designing adaptation of the constituents and the system as a whole, (vii) devising and scheduling the implied interventions, and (viii) actuating effectors and controls. By self-managing their operation strategies in run-time, intellectualized CPSs (i) can adapt their services according to the actual needs and states of stakeholders in an anticipating or proactive manner, (ii) become applicable a wide range of human and social applications, and (iii) achieve the objective mentioned in the sub-heading, i.e. provide timely and tailored services for everyone (Delicato et al., 2020).
3Issues of smart designing of NG-CPSs
3.1Utilization of digital twins
From a methodological point of view, the design process of CPSs goes through the following creative activities and areas of knowledge: (i) the inception domain (specifying needs and affordances), (ii) the conceptual domain (ideas and requirements), (iii) the functional domain (functions and physical principles), (iv) the architectural domain (components and structures), (v) the operational domain (workflows and parameters), and (vi) the assessment domain (verification and validation). This sequential-looking procedure is however more a path finding, than a path following process. Due to the different knowledge background, research and design approaches, and working cultures, model-based system engineering (MBSE) plays a crucial role of current CPSs development. MBSE involves design methods that are (i) modelling language-based (ADL, Modelica, Ptolemy, STL, SysML, UML, . . .), (ii) computational tool-based (AMESim, Java PathExplorer, MatLab, Modelica, U-Check, . . .), and (iii) ontological framework-based (Hozo, OntoEdit, Dolce, Protégé, . . .). The major methodological issue of designing CPSs is to ensure correct-by-design behaviour (Roy et al., 2018). This issue is cumulatively present in the case of both smart CPSs and CPSoSs, and makes their design process iterative (Blackburn et al., 2018). It underlines the need for a trans-disciplinary design methodology for smart CPSs that would address not only the design and implementation stages of smart CPSs, but also their complete lifecycle.
As mentioned earlier, model-based design and model-integrated development are the currently typical approaches of designing and realization of CPSs systems. Model-based design and specification have been complemented with model-based verification of the operation logic and validation of the performance of CPSs. Modelling is based on both aspect models and meta-models (Legatiuk et al., 2017). Aspect models separately address functional, architectural, operation, interaction, etc. aspects, while meta-modeling has been introduced to specify the structure, semantics, and constraints for a family of models simultaneously in a certain domain. The Object Management Group (OMG) developed a model-driven architecture (MDA) that provides a set of standards that includes the representation and exchange of models in a variety of modelling languages (Mellor et al., 2004). Furthermore, the OMG proposed standards for model-driven engineering and for meta-modeling in the context of data warehousing, respectively. The first standard is called meta-object facility (MOF) and can be used to express meta-models, whereas the common warehouse meta-model (CWM) defines a specification for meta-modeling in the context of data warehousing.
As a holistic approach of considering the lifecycle of smart CPSs, among others, the closed loop system engineering (CLSE) approach was proposed that extends MBSE aspects of system lifecycle management. Thomas et al. (2019) posited that CLSE is becoming a reality using data-driven, field communication enabled, digital twin-based technologies. Notwithstanding, the current hot research issue of how system performance and dependability can be verified and validated in the design stage based on abstract functional level representations is getting combined with the issue of system assurance and optimization in the run-time stage. On the path leading from the model-in-the-loop (MitL) situation to the system-in-the-loop situation (SitL), the digital twin-in-the-loop is a necessary and rational methodological step. The digital twin (DT) concept is seen as the conceptual and computational resource that can capture, model, and investigate smart CPSs during their lifecycle in the framework of CLSE (Fresemann & Lindow, 2019). It is also regarded as a novel enabler of system-level control. Evidently, application of digital twins significantly increases the complexity of the overall development of CPSs and CPSoSs.
DTs are seen as the next wave in multi-aspect simulation and the key enablers for data-driven decision-making (Jones et al., 2020). Though they share many technological and operational concepts, CPSs and DTs are different (Barricelli et al., 2019). Tao et al. (2019) compared CPSs and DTs based on their (i) origin and development, (ii) category, (iii) augmentation, mapping and control of physical and cyber, (iv) unit-, system- and system-of-system-level modelling, (v) function implementation, and (vi) core elements and integration approaches. Interested readers are encouraged to study the article for a fuller treatment of the technical details. DTs are ultra-realistic mega-models that provide communication with physical artefacts and environments, and virtual representations of systems along their lifecycle. Because of these potentials, they have been regarded as a critical constituent of smart CPSs (Qi et al., 2018). Among others, Sharma et al. (2020) argued that a general underpinning theory of the DT methodology (also a universal reference framework) is still missing. Nevertheless, only local theories were proposed for solving application related problems. Moreover, the technical details of the majority of the proposed application-dependent implementations are not made publicly available.
Every DT includes three constituents: (i) physical assets, (ii) digital assets, and (iii) synchronized interaction assets. As levels of integrating a digital twin with a physical environment, Ahelerofh et al. (2021) considered: (i) digital off-line (no real-time link between physical and digital), (ii) digital shadow (one-way real-time data from physical to digital), (iii) digital twin (bi-directional real-time data between physical and digital), and (iv) predictive twin (two-dimensional real-time data communication over cyberspace) levels. Digital twin technology has been used to simulate real-time working conditions, to analyse different operational scenarios, and to support intellectualized decision-making of smart CPSs. Stark et al. (2019) proposed eight factors to consider at judging the completeness of a “living” digital twin. They are: (i) breadth of integration, (ii) modes of connectivity, (iii) frequency of updates, (iv) intelligence of CPS, (v) capabilities of simulations, (vi) richness of digital model, (vii) interactions by humans, and (viii) lifecycle of products.
Efficiency and security of data management and communication are crucial issues in the daily practice of CPSs. The block-chain (BC) concept has been intensively studied and variously implemented to provide a trustful approach towards these ends, as well as to support process integration in distributed systems ( Sarmah, 2018). The BC technology utilizes the concept of identical decentralized databases and creates peer-to-peer networks that run on top of the Internet, and monitor and record digital events that have been executed and shared among participants (Tao et al., 2020). When a communicative transaction is initiated by an actor of a cyber-physical system of systems, it is (i) represented online as a block, (ii) the block is forwarded to every node of the network, (iii) the block and the transaction are approved by all nodes as valid, (iv) the block is added to the chain of executable transactions, and (v) the transaction is executed by the concerned node (Saberi et al., 2019).
Lim et al. (2020) proposed a model for describing the technology stack of digital twins that identifies communication (data management and connectivity platforms, and exchange protocols), representation (data representation tools, data formats, and concept ontologies), computation (data evaluation, analytics, and machine learning), and micro-services (virtualization, simulation, and validation) layers. Starting out from converging views in the construction industry, Boje et al. (2020) suggested a generational evolution model of digital twins. This model can be generalized beyond the boundaries of the construction industry. In their conceptualization, the orthogonal axes of lifecycle integration and supply chain organization stretch the reasoning space of the three-tier model.
The first generation of DTs are monitoring platforms (with sensing, monitoring, and analysing capabilities), the second generation establishes intelligent semantic platforms (extending the capabilities of the first generation with artificial methods), and the third generation consists of agent-driven socio-technical platforms (augmenting the capabilities of the second generation with simulation, optimization, learning, and end-use engagement functions). The major concerns of digital twin development are fidelity and computability. Fidelity is proportional with the number of parameters and the amount of data transferred between the physical and virtual entities, their level of abstraction, and their accuracy. Computability is concurrently influenced by the complexity of the computational (data elicitation, aggregation, storing, reasoning, simulation, representation, synchronisation, etc.) mechanisms and the processing capacity of the computational infrastructure (networked computers, edge computing, cloud computing, etc.). With the rapidly increasing complexity, it is impossible for administrators to understand the massive complex data and then give proper commands in time to instruct a CPS to take right activities.
From an information engineering perspective, a DT is a mega-model, rather than a meta-model, which is an additional abstraction that specifies the properties of the aspect models. It is still to be investigated how DTs contribute to smartification of the development process and lifecycle management of CPSs. More specifically, what DTs can offer for: (i) synthesis of domain knowledge and getting additional intelligence, (ii) conceptualization and analysis on a wider solution space and enabler basis, (iii) more insightful and objective decision-making, and (iv) operation under dynamic and uncertain circumstances? DT-based CLSE raises the issue of reliable real-time interoperation of the physical, the virtual, and the cyber world. Neither are the implications of introducing DTs in the development practice of smart CPSs completely explored yet. It is known that the needed engineering effort depends, to a considerable degree, on the functional (cognitive) complexity, i.e., the time needed to conceptualize, implement, and validate the behaviour of a system. That is, the major cost elements during the specification, design, operation, evolution, and maintenance of a large CPSoSs are accrued in the non-physical domain. On the other hand, any reduction of the functional and cognitive complexities of a large system from human comprehension and interaction point of view, and any increase of the cognitive capabilities of large systems from an autonomous operation point of view, have utmost economic significance and reduce the probability of the occurrence of design errors. Smart design, which simply means a process enabled by artificial intelligence for many, is regarded as a main enabler of achieving these goals.
3.2Issues of run-time self-supervised self-adaptation of NG-CPSs
In evolutionary biology, adaptation is the process of dynamic evolutionary change by which an organism or species becomes better suited to its environment. Historically, it led not only to more suited individuals, but also to various forms of socialization that could increase the probability and efficiency of survival. Since adaptation is a complex and non-deterministic physical, behavioural and social phenomenon, it is important to note. Though adaptability increases the operational dependability and efficiency of systems, it also increases their design and operational complexity, and reduces their deterministic nature. On the other hand, adaptation can increase human-independence of systems and paves the road to automation. An essential difference between biological adaptation and system adaptation is that the former (like the capability of learning) is an inheritable capability, whereas the other (like the result of learning) is not. Self-adaptation of systems is a reflexive action. Therefore, it differs from the other operational functions. In the most general sense, research in self-adapting systems studies the phenomenon of using technology to manage technology and system manifestations. The vector of self-supervised self-adaptation points to automation and involves intellectualization.
One of the general theories of adaptive systems was created by Ashby (1960) as early as the late 1950s. He wanted to create a general theory that would encompass both animate and inanimate systems. In his theory of adaptation, two feedback loops are required for a machine to be considered adaptive. The first feedback loop (i) operates frequently, (ii) enables an organism or organization to learn a pattern of behaviour that is appropriate for a particular environment, and (iii) makes small corrections. The second feedback loop (i) operates infrequently, (ii) enables the organism to perceive the change of the environment has and that learning a new pattern of behaviour is required, and (iii) changes the structure of the system, when the “essential variables” go outside the bounds required for survival. In the 1960s, the concept of self-organization became a central topic of discussions (Umpleby, 2008). The addressed dilemma was whether intellectualized systems should be programmed to behave in an intelligent and autonomous manner, or they should be designed to be able to learn from their performance, state, and environments and to manage themselves. The first approach was adopted by artificial narrow intelligence research and development, whereas the second approach was adopted by systems engineering.
In the last decade, research in self-adaptive systems became a hot issue (Weyns, 2019). The fact of the matter is that much more attention was given to self-adaptive software systems, than to the self-supervised adaptation of smart cyber-physical systems. The simplest implementation of self-adaptive software is a closed-loop system with a feedback aiming to adjust itself to changes during its operation (Salehie & Tahvildari, 2009). McKinley et al. (2004) addressed the issue of compositional adaptation of software to equip them with the ability of modifying their structure and behaviour dynamically in response to changes in its execution environment. Tavčar & Horváth (2018) provided an overview of the principles of designing smart cyber-physical systems for run-time adaptation, while Zhou et al. (2019) surveyed the technological fundamentals of self-managing CPSs. In self-aware systems, state and situation awareness are closely associated with context awareness. Mapping of the activities and characteristics of adaptive systems is an acute topic for current research. To concisely express all self-manageable functions, the term ‘self-*’ has been introduced, where the * may stand for adaptation, awareness, healing, maintenance, optimization, supervision, tuning, and so forth.
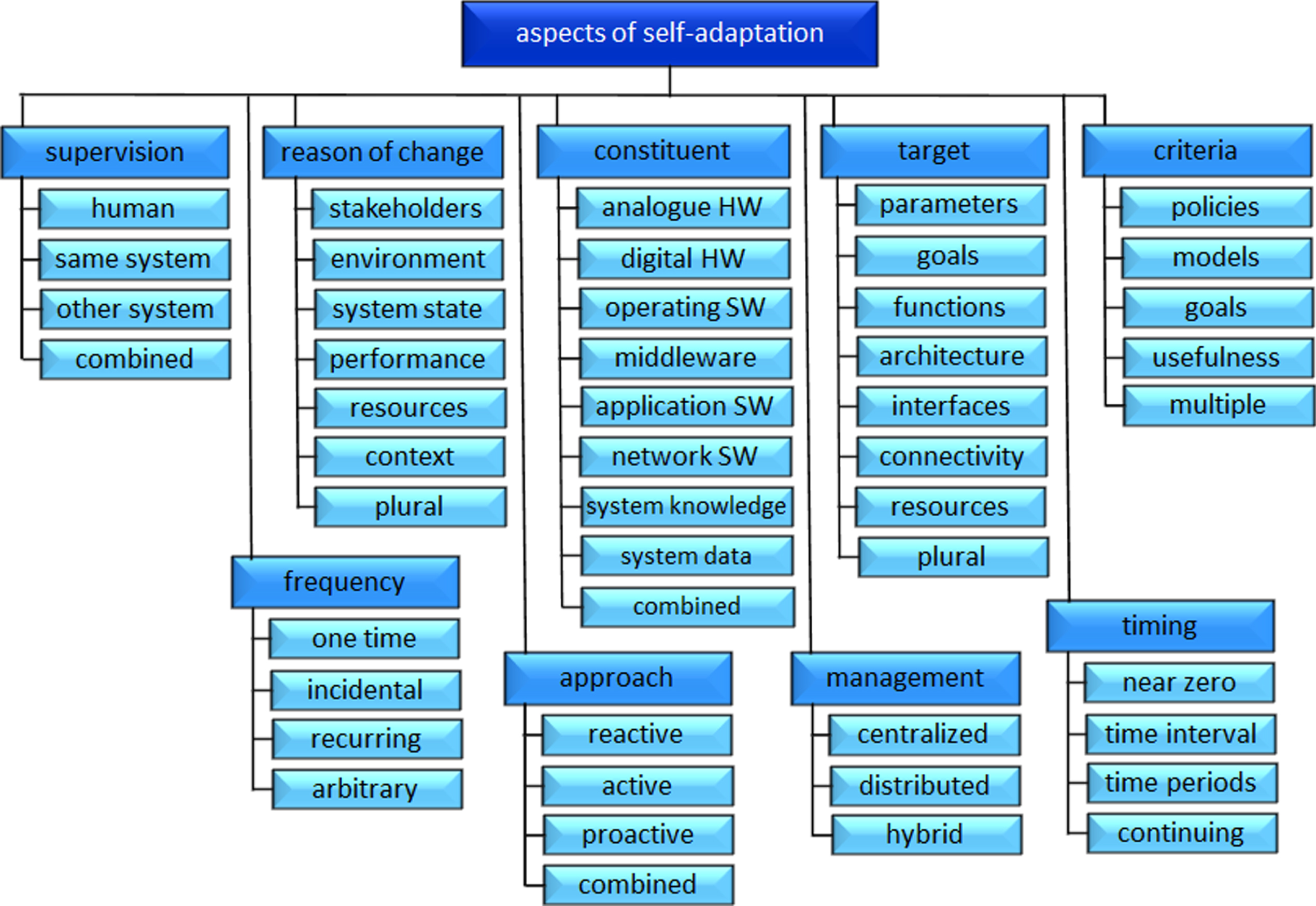
Krupitzer et al. (2018) presented a taxonomy of the important characteristics of self-adaptation. Considering the developments in the last three years, the model shown in Fig. 4 is an extension of this model. These overviews are important since there are many dimensions of system adaptation, for instance: (i) component parameter-level (composable adaptation) versus system behaviour-level (compositional adaptation (Shevtsov et al., 2019), (ii) reactive adaptation (after event time) versus proactive adaptation (before event time) (Muccini & Vaidhyanathan, 2019), (iii) model-driven adaptation versus data-driven adaptation (Li et al., 2019), (iv) architecture-based approaches versus reflection-based approaches (Cheng et al., 2002), (v) analogy-based approaches versus learning-based approaches (Rodrigues et al., 2018), (vi) centrally managed adaptation versus distributed managed adaptation (Nallur & Bahsoon, 2012), and (vii) protocol-based approaches and agent-based approaches (Hielscher et al, 2008). With regard to the temporal dimension of self-adaptation, four cases are differentiated: (a) lifetime adaption, (ii) seasonal adaptation, (iii) occasional adaptation, and (iv) incidental adaptation. No matter what approach of adaptation is applied, verification of the adaptation plans, as well as validation of the outcome of adaptation are important issues (Eberhardinger et al., 2014).
Fig. 4
Aspects of system adaptation.
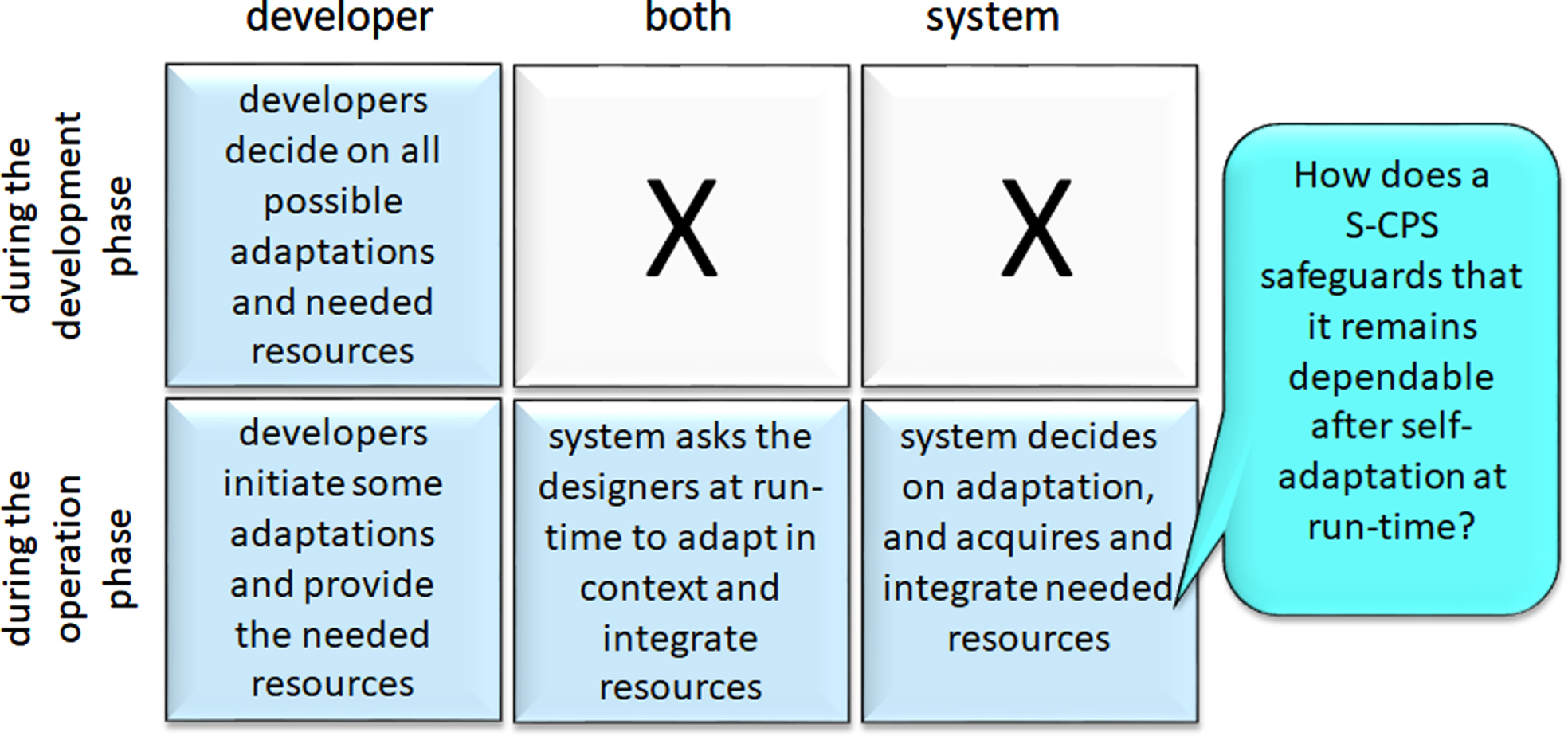
Considering its goals, self-adaptation of CPSs can be of two types: (i) system-orientated adaptation, and (ii) environment-orientated adaptation. The former is to guarantee the dependability of the physical and cyber infrastructure, the uninterrupted and optimized operation, and the availability, reliability, and the quality of services. The latter is concerned with the continuous and proper (reactive or proactive) interoperation and cooperation with external (natural, created, social, and human) systems. A managing sub-system and a set of managed sub-systems are the constituents of an adaptable system. The managed sub-system can be one individual system or a system of systems, whereas humans or a control system can form the managing system. In the first case, we talk about human control and/or environmental control. In the second case, we talk about self-adaptation if the controlling system is part of the controlled system. Systems can adapt themselves in multiple dimensions such as (i) physical, (ii) cyber, (iii) functional, (iv) architectural, (v) technique, (vi) level, and (vii) control. From the point of view of design and planning, we can distinguish (i) adaptation managed in the design-stage, and (ii) adaptation managed in the operation-stage. From the viewpoint of specification, adaptation may be defined and controlled by (i) human supervisors, (ii) the concerned systems, and (iii) involving both humans and the system. Lastly, from the viewpoint of realization, it can be done (i) in run-time (without suspending operation and servicing, and (ii) in idle-time (under out-of-operation state of the system). The feasibility of the resultant approaches is shown in Fig. 5.
Fig. 5
Approaches of system adaptation.
The core enabler of compositional adaptation is the middleware. It encompasses all software means that separate the computer and network operating systems and the application programs. Schmidt (2002) differentiated four layers of middleware: (i) host infrastructure homogenizer, (ii) distribution interfaces, (iii) common services, and (iv) domain-specific services. Autonomic computing was proposed as a comprehensive solution to system self-adaptation (Kephart & Chess, 2003). Its idea came from a biological analogy, more precisely, from the autonomic nervous system that monitors the vital function without any conscious effort in the case of humans and mammals. As discussed in a white paper, there are obvious differences between the autonomic capabilities in the body that allow making many of the decisions in an involuntary manner and the autonomic capabilities that can be implemented in self-managing computer systems that perform tasks determined by the system developers and technological affordances (IBM, 2006).
3.3Issues of self-evolution of NG-CPSs
Self-evolution is a current hot topic in the field of software systems, but much less attended in the contexts of CPSs or S-CPSs. Adaptation may turn into evolution when additional resources are provided for the system at run-time. It is a fact that the largest progress has been achieved in the field of software systems. Self-evolution of software decomposes to a large number of concerns such as: (i) dynamic programming resources and methodologies, (ii) changing the adaptation logic at runtime, (iii) self-supervised and controlled functional evolution mechanisms, (iv) self-supervised and controlled architectural evolution mechanisms, (v) dynamic, run-time and timed software resource management, (vi) self-supervised and controlled para-functional self-adaptation mechanisms, and (vii) recognizing, deployment, and utilization of emergent affordances.
Weyns et al. (2021) made a contribution to conceptual framing and understanding the major domains of concern of software self-evolution and system supervision. Rivera et al. (2021) proposed to use digital twins for managing run-time evolution of cyber-physical systems in dynamic environments. Two dominant tracks in the development of NG-CPSs are facilitating reliable self-evolution and reaching self-supervised autonomy. Related to both tracks, the key issues are the extending the hardware, software, and cyberware resources of systems at runtime and adjusting the system objectives, operation, performance, and relationships according to new opportunities and the obtained affordances (Yan et al., 2012). Dynamic management of the operational and servicing goals of systems based on emerging run-time requirements is also recognized as an important topic for further studies. The current literature offers neither robust underlying theories nor structured methodologies for evolutionary and autonomous self-adaptation.
4Socialization and cooperation with smart systems
4.1Issues of multi-dimensional cooperation with NG-CPSs
Intellectualization of CPSs has orientated the attention of researchers to the importance and unsolved issue of (non-supervisory) cooperation with and among these systems. This research challenge appeared first in the world of robotics (Feil-Seifer & Matarić, 2009). Managing productive cooperation is a complicated matter that includes both interaction and interoperation elements, no matter if humans, systems or both are concerned. The main factors influencing cooperation have been identified as (i) actors, (ii) arrangements, (iii) domains, (iv) modalities, (v) contexts, and (vi) levels of cooperation. Based on these factors, a stratified model of human-system cooperation was constructed, which serves as a conceptual framework for cooperation design under the influence of multiple factors (Horváth & Wang, 2015). Traditionally, human individuals or teams were the sole active actors and supposed to initiate cooperation with systems passive in terms of initialization. However, intellectualization of systems has led to situations in which human actors and system actors can play an equal role. It also means that active systems can initiate cooperative actions. This is important, for example, at the implementation of smart home care by assistive robots (Miller, 1998). Cooperation of systems has become a routine activity. In current research, social robotics systems and their constituents are viewed as social actors (Duffy, 2006). An example is collaborative social (system) agents. The term ‘social robots’ was initially applied to distributed and cooperative multi-robotic systems in which task-specific communicative humanoid robots accomplish collective goals and autonomously interact with humans in a socially meaningful way (Wakabayashi et al., 2011).
At organizing cooperation between human and system actors, various arrangements should be taken into consideration. On the one hand, system-in-the-loop (SitL) arrangements (which tailor the operation and services of CPSs according to the human needs and satisfaction) are to be considered by system developers together with human-in-the-loop (HitL) arrangements (which place humans into a controller or a supervisor position). Using artificial intelligence enablers introduces additional articulation in the HitL arrangement. In this, the amount of and the balance between the needed human agency and the artificial intelligence enablers (AIE) play an important role. The human agency required in cooperation is a measure of how much humans remain in control of the outcomes of an intellectualized CPS (regardless of whether or not the system continues learning autonomously) (Berberian et al., 2012). In this context, HitL means that the AIE-based CPS may suggest decisions, but the final decision is always made by a human actor. In addition, a human-on-the-loop (HotL) situation is also possible, in which the AIE-based CPS takes decisions by itself but the results are always supervised by a human actor and intervention is made in case of incorrect decisions. Lastly, a human-out-of-the-loop (HootL) situation is also possible, in which the AIE-based CPS takes decisions by itself without any human intervention or oversight. In this progression from the interactive control situation through the remote supervision situation to automated operation, different human agencies, insights, and decisional responsibilities are to be provided. This offers uncountable phenomena to investigate, as well as affordances to exploit.
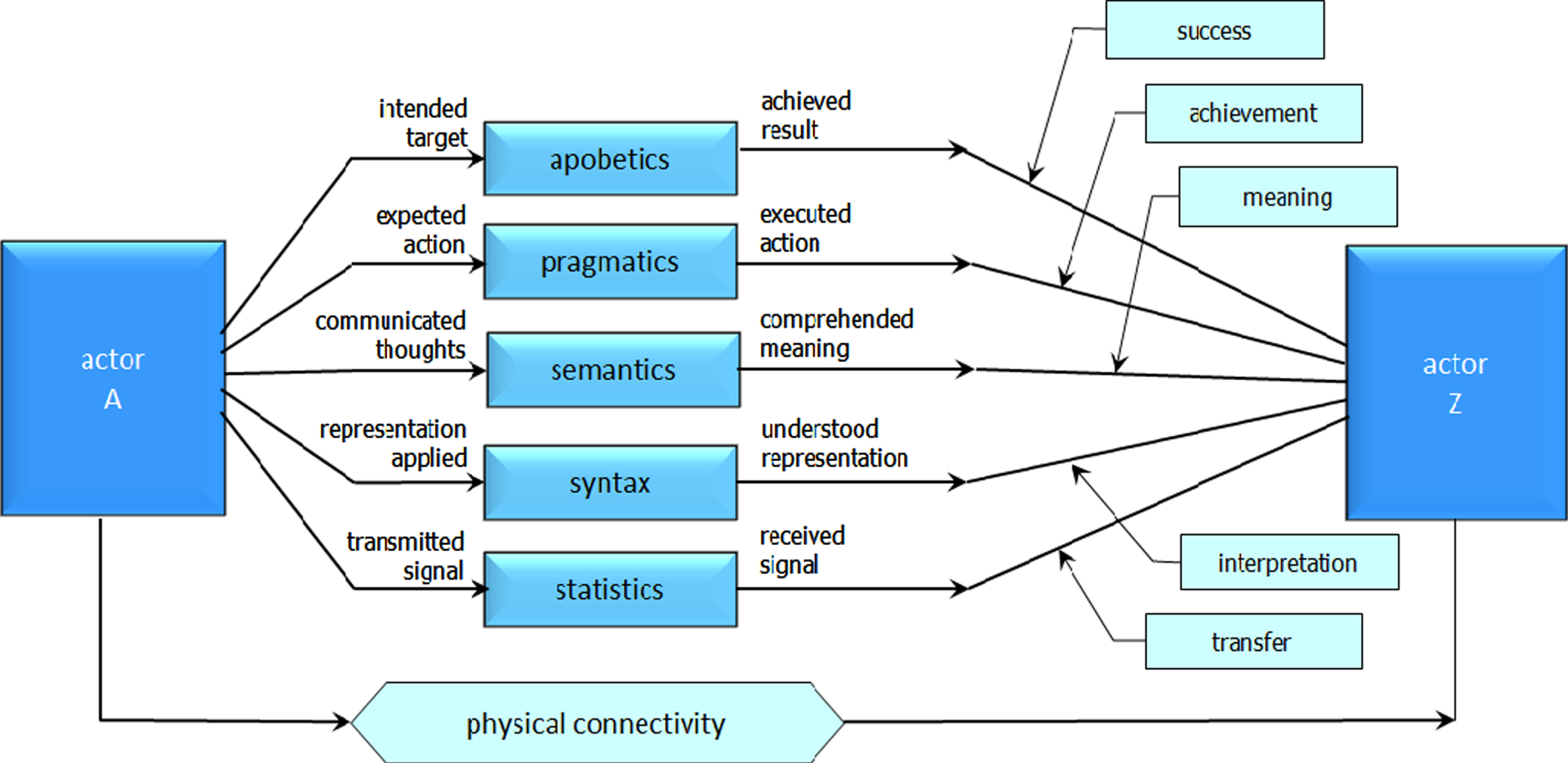
Cooperation may happen in (i) motor, (ii) perceptive, (iii) cognitive, (iv) emotional, and (v) combined domains. Modalities are mechanisms for transformation of physical energy effects into nerve impulses or sensory transductions. Typical forms are: (i) vision (e.g. seeing, gazing, lighting), (ii) audition (e.g. speaking, sound, hearing), (iii) haptics (e.g. grasping, tactile, proprioception), (iv) thermal (e.g. heating, cooling, thermoception), (v) olfaction (smelling, odoration), (vi) gustation (tasting, recognition), and somatic (balance, nociception, motion, gesture). Cooperation between human and system actors may happen on multiple activity and informational levels, which are shown in Fig. 6. Physical connectivity is the basis of cooperation on all higher levels. Syntactic-level cooperation involves statistical distributions and grammatical constructs. Semantic-level cooperation involves interpretation by human cognitive processes or referring to taxonomical and ontological structures in context. Pragmatic-level cooperation means activities towards successfully achieving the objective of cooperation under varying conditions. Apobetic-level cooperation attempts achieving not only the intended goals and expectations, but also the individual satisfaction value objectives, and quality standards of the actors (Lee et al. 2005). Formalization and operationalization of the domains, modalities, and levels is complicated not only due to the lack of effective methodologies but also due to the immature and disjoint underpinning theories (Horváth, 2012).
Fig. 6
Levels of cooperation in smart CPSs.
4.2Issues of socialization of NG-CPSs
In sociology, socialization of humans is the continuing process by which individuals acquire the values, norms, habits, and attitudes of a society but it also means preferred forms of interaction and cooperation (Ropohl, 1999). In the field of developmental psychology, Moreland & Levine (1982) identified five stages of developing social commitments by entities (individuals and groups), namely: (i) investigation, (ii) socialization, (iii) maintenance, (iv) resocialization, and (v) remembrance. When imposed on systems, the concept of socialization results in two dimensions of social interaction: (i) in the relationships of humans and systems or systems and humans, and (ii) in the relationships of systems and systems. As the literature documents it, the idea of system socialization first emerged in the domain of robot research and development. Over the years, humanoid robotics, which is nowadays often seen as a branch of the discipline of socialized cyber-physical systems, has become the most advanced field of socialization of intellectualized engineering systems. Robot socialization research deals with both dimensions.
The term ‘social robots’has been used to refer to new types of robots which, as social actors,(i) work toward accomplishing shared goals co-operatively, (ii) raise the feeling of social presence, (iii) provide context-sensitive social responses, and (iv) can autonomously interact with humans and/or other robotic systems in a socially meaningful way. A robotic entity involved in the process of socialization acquires its individual identity and the social skills appropriate to its social positioning. Over the years, the concept of socialization has been extended to other genres of intellectualized engineering systems such as multi-agent software systems and smart cyber-physical systems. Evidently, socialization increases both the development and functional complexity of all kinds of systems and challenges our present understanding of complex social behaviour. Calvano & John (2004) left us with the tentative conclusion that truly socialized complex systems cannot be designed with a degree of confidence that is acceptable given our current expectations.
Many authors argued that socialized robots should exhibit the major human social characteristics, for instance: (i) form a collective of purpose-driven actors, (ii) establish and maintain social relationships with multiple actors, (iii) communicate with high-level dialogue means of uttering, (iv) exhibit distinctive personality and character, (v) learn, recognize, and adapt to behavioural models of other actors, (vi) acquire, develop, and enhance social competencies, (vii) render, express, and/or perceive emotions, and (viii) use natural cues (body language, gaze, gestures, etc.). Considering various socialization models and interaction scenarios, Breazeal (2003) identified four classes of social robots, namely: (i) socially evocative, (ii) socially interfacing, (iii) socially receptive, and (iv) socially pro-active robots. Based on their relationships to the embedding environment and to the extent of social competence, Fong et al. (2003) introduced three additional classes: (i) socially situated, (ii) socially embedded, and (iii) socially intelligent robots.
Most of the related publications focus on socialization in human context but only a fragment of them has addressed the novel issues of system-system socialization. For instance, Lee et al. (2005) specified three key dimensions of being a social robot: (i) anthropomorphic forms and behaviours, (ii) mimicking human emotion or emotion-like internal states, and (iii) showing compelling personality features. Dautenhahn & Billard (1999) interpreted social robots as embodied agents that are part of a heterogeneous group (a society of robots or humans). They are able to (i) recognize each other and engage in social interactions, (ii) possess histories (perceive and interpret the world in terms of their own experience), and (iii) explicitly communicate with and learn from each other. Socialized robots are supposed to render not only direct communication and negotiation, but also the principle of stigmergy that assumes indirect communication between individuals via modifications made to the shared environment (Beckers et al., 2000). Having the capabilities associated with the latter, social robot will remove a physical obstacle that may be harmful for humans and/or other robots. These functionalities can convert anonymous groups of robots into a society of individualized socialized robots (Halme et al., 1993), (Bugental & Grusec, 2007).
With respect to CPSs, two conceptualizations of social nature have emerged. They are called: (i) social-cyber-physical systems (SCPSs) and (ii) cyber-physical-social systems (CPSSs). What makes these conceptualizations distinct is that the former one intends to implement the ‘system-in-the-loop’(SitL) strategy by making SCPSs self-adaptive to humans and that the latter one anticipates putting human stakeholders into the operational/servicing loop of CPSSs. Theoretically and in practice, these imply two different forms of socialization of CPSs with regard to humans (Sheth et al., 2013). In addition, it needs to be considered that the strategy of SitL assumes that a given system can be put into the operational and/or servicing loops of several other systems – that raises the need for a different conceptualization of their socialization. Horváth, I. pointed at some basic functional and social abilities that SCPSs should render: (i) detecting users and the social connections between them, (ii) accessing and blending users’ activity and data streams, (iii) inferring the social context according to users’ networks topology, preferences, and features, (iv) inferring social goals according to the social context and the user model, (v) learning and coordinating the social behaviour of users, and (vi) providing social context-driven output. The awareness of SCPSs should extend to the intangibles of social context, which include social culture and norms, personal beliefs and attitudes, and informal forms of social interactions (Baxter & Sommerville, 2011).
It is argued by Poovendran (2010) that CPSs change the notion of physical systems (e.g., vehicles, machine tools, consumer durables) by including humans and the environment in a system-of-systems framework, and thus creating a uniquely large scope and context in which the system behaviour must be predictable and provable. As shown in Fig. 7, organization of systems, intellectualization of systems, and socialization of systems are aspects of naturalization of systems. The assumption is that they will eventually lead to a natural trans-humanist society (Bostrom, 2005). While the act of organization establishes operational relationships, the act of intellectualization establishes cognitive relationships. Research should conduct rigorous social compliance investigations and formulate the norms (Geels, 2005). As socially relevant design issues, current literature identifies such as (i) balance between privacy and availability, (ii) cyber and physical security, (iii) access control and intrusion detection, (iv) encryption, key management, and secure protocols, (v) intelligent informing and classification, (vi) data mining for the detection of physical and cyber attacks, and (vii) verification and validation in social contexts, but it is not so explicit on the self-capabilities of the systems concerning social and environment adaptation. The focus of current research is gradually shifting from the integration of a large number of homogeneous and heterogeneous systems and creating interfaces among them to provide a knowledge model for social context-awareness and reasoning by using ontology-based context modelling, various typified user models, and exploitation of social networks. The system-of-systems thinking urges the development of social context ontologies as the centre of the context modelling.
Fig. 7
Convergence of organization, intellectualization, and socialization of CPSs.
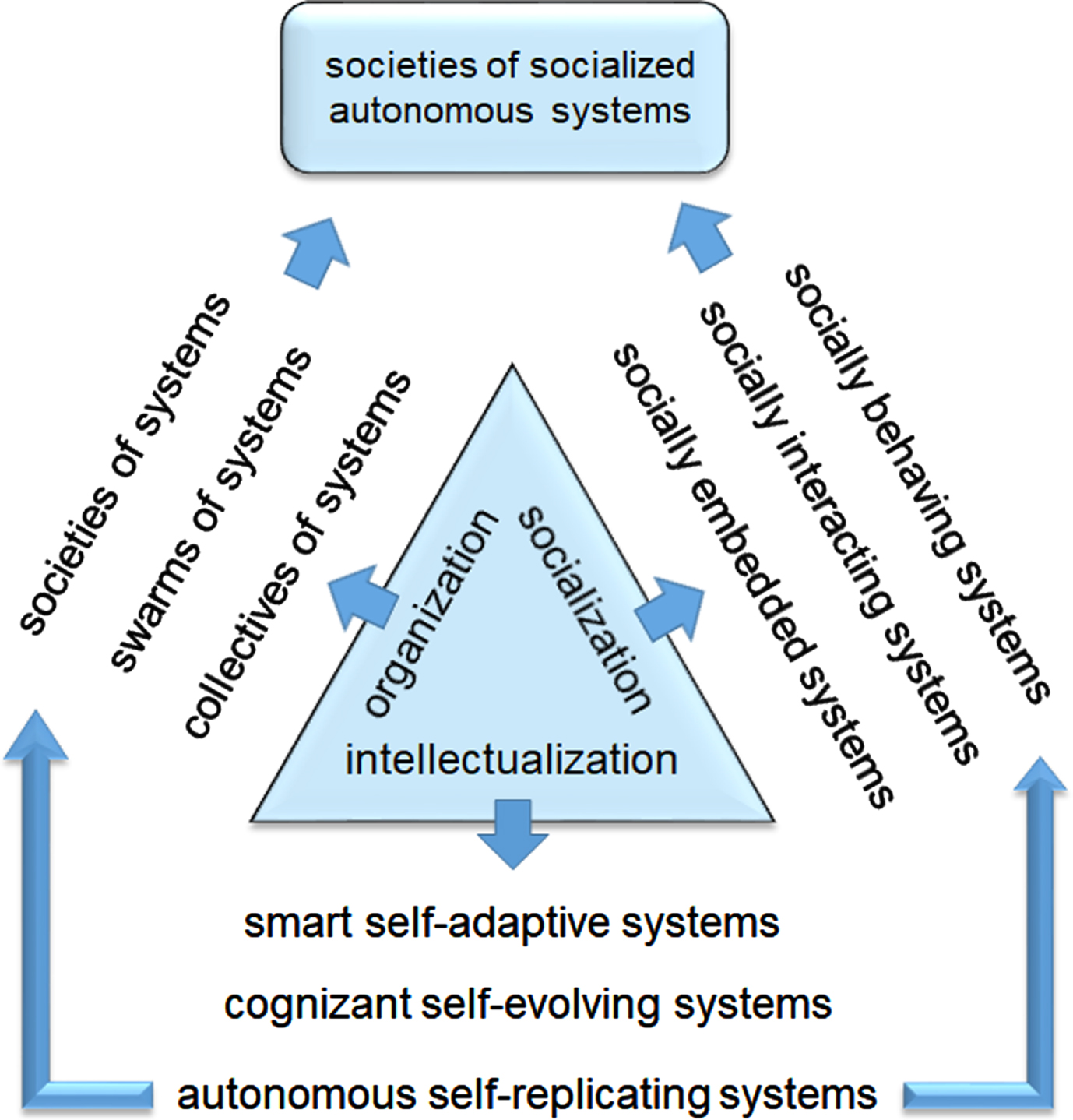
Cyber-physical systems are also penetrating into human cognitive processes (Trist, 1978). Hence, humans should also be studied from the perspective of living with and cooperating with CPSs. However, the natural mechanisms of recognizing patterns by humans and generalizing them into models are not sufficiently understood. Therefore, the implementation of these by using machine learning still faces many limitations. This recalls the issues of context-sensitively adaptive interface development, as well as the need for new insights in the motor, perceptive, cognitive, and affective cooperation of humans with these systems. Typical form of interaction with a branch of CPSs is tele-operation that manifests in a remote and distributed communication and manipulation. This has been applied, for instance, in the case of networks of robots and sensors that work in a cyber-physical space with a remote human in the loop to accomplish dangerous, unpleasant or super-human activities. Minimal intrusion to human and environment can be facilitated by enrichment of system operation by agent-based smartness. There are huge knowledge gaps in these contexts, as well as challenges such as overseeing complexity, real time information provisioning, etc. (Geels & Kemp, 2007). The exponential proliferation of cyber-physical systems, which is afforded by Moore’s law, is not matched by a corresponding increase in human ability to consume information! Therefore, future requires designing for social and mental symbiosis.
4.3Understanding and implementation issues of para-functions of NG-CPSs
Socialization of CPSs also means that not only their functional capabilities and services but also their para-functional capabilities are regarded as important. Para-functions include system operations and activities that serve as background, auxiliary, accompanying, or context operations for realization of the purported system functions and services. They are distinct from the latter, but are analogous with them. From a system engineering perspective, para-functions are not habitual or abnormal operations and activities, but regular system operations and activities, and should be designed as such. The current literature is still very limited concerning the specification and investigation of para-functional (system) capabilities (PFCs). Nevertheless, many examples of PFCs can be mentioned, for instance, awareness, affectedness, learnedness, carefulness, inventiveness, cooperativeness, timeliness, and so forth. Taken literally, these terms are related to how to do something and not to what to. Equipped with PFCs, NG-CPSs should simultaneously compute and reason in the functional domain and the para-functional domains in an intertwined manner. This introduces additional heterogeneities and complexities.
The notion of para-functional activities originates in the field of biology, medicine, and behavioural science. In the field of engineering, the concept of para-functionality first appeared in the context of a methodology for programming multiprocessor computing systems (Hudak, 1986a). There, it augments functional programming models with features that allow programs to be mapped to specific multiprocessor topologies (Hudak, 1986b). It makes achieving the goals of a program possible in a holistic way and by providing additional capabilities (in the above case, for instance, complex message sending and synchronization among processors). De Niz Villasenor (2004) proposed a model-based decomposition framework for designing embedded real-time systems that reduce the complexity of both functional and para-functional aspects of the software. In this work, a new abstraction called coupler is introduced as a new encapsulating abstraction for para-functional elements. As a fundamental problem, Gill (2003) revealed that functional and para-functional properties can interfere in subtle and complex ways that are often insufficiently represented, checked or corrected in the overall system programming model. De NizVillasenor and Rajkumar (2003) analysed the core relationships that can be used to isolate para-functional properties (dubbed as para-functional relationships) from functional behaviour, using the case of a radar system. Dunne (2006) operationalized the concept of para-functional relationships to electronic products that offer cognitive experiences in addition to ‘form and function’ experiences. The related literature suggests that artificial system intelligence provides new opportunities for realization of wide range of para-functional capabilities in CPSs (Cardon, 2006). The reproduction of such para-functional capabilities received a lot of attention in artificial general intelligence research, and the results are just being taken over to the domain of NG-CPSs (Graziano, 2017).
Typically, the manifestation of PFCs in cyber-physical systems has multiple aspects or elements. For example, awareness is a dual capability that simultaneously involves (i) having a knowledge or perception of a situation or fact, and (ii) being concerned about and well-informed in a particular interest, situation, context, and development. Affectedness is (i) the quality or state of being affected by sentiments (feelings), (ii) the resilience or sensitivity to being influenced by emotions, and (iii) being pretentious about having or not a particular sensation or excitements. Scholarliness is the capability of (i) having and exercising a strong interest in learning, (ii) knowing what, why, when, and how to learn, and (iii) being able to filter organize, structure, and classify acquired knowledge, and (iv) semantically combine parts of existing and obtained knowledge. Carefulness is the capability of (i) being cautious and thoughtful in decision making, (ii) giving due or sufficient attention to acting, and (iii) foreseeing obvious or even possible consequences of decisions and actions made by a system. It is important to emphasize that the abovementioned PFCs are just examples, but are far not the whole spectrum of possible para-functional capabilities. Furthermore, important to see that many of them are strongly and transitively interrelated, and that their interrelations form a kind of capability network exactly in the same way as it is with capabilities of human beings or organizations. For instance, awareness is a prerequisite for carefulness, inventiveness assumes learnedness, and timeliness supposes awareness, cooperativeness, and carefulness. The major issues are: (i) the notion of para-functionality and the para-functional capabilities have not been consolidated yet in the context of NG-CPSs, (ii) the relations between functional and para-functional capabilities and operations are clarified neither from a teleological, nor a computational viewpoint, and (iii) there are no methodologies for overall designing for para-functional capabilities. Further research may explore important knowledge and best practices in this domain.
5Reflections and concluding propositions
5.1Some reflections
The first reflection I want to make starts out from a common saying that is often heard from true scientists: “We know a lot, but never enough.”I think this applies to the current situation of research and development of CPSs, smart CPSs, CPSoSs, and NG-CPSs. The concept of CPSs is going through a paradigmatic change, is influenced by the knowledge, principles, and approaches of many related disciplines, and should fulfil many novel societal demands by exploiting novel technological affordances. On the other hand, functional and physical complexity of CPSs is intensively growing and begs for proper design methodologies. The on-going intellectualization of CPSs not only contributes to the experienced aggregative complexity, but also needs deeper theoretical fundamentals and smarter creative support. Therefore, what we already know will probably not sufficient for designing next-generation CPSs.
The second thought I want to mention is actually a question: Can we really foresee the future of cyber-physical systems? This is also an influencing factor of designing next-generation cyber-physical systems. As an example, I mention the paper of Törngren and Grogan (2018), which considered complexity as the major challenge of designing next-generation CPSs. Very recently, Broo et al. (2021) identified intelligence, connectivity, and electrification as three main challenging properties of CPSs. They regarded these as rather new dimensions and showed the differences with the systems that our traditional applied research and engineering education are predominantly experienced in. Due to the abovementioned pace of development, technologies and methods become suppressed by other emerging technologiesand become neglected without exploring all opportunities they could offer. On the other hand, the increased pace does not give enough time for the synthesis and consolidation of the design methodologies, and for the development of smart tools that are needed for the development of smart systems.
The third comment concerns the difficulty of argumentation due to the differing terminologies. What is a smart system? What is an intelligent system? The two adjectives are often used as synonym, and as tautologies like “smart is intelligence –the ability to learn or understand or to deal with new or trying situations”. To resolve such a dilemma, Romero et al. (2020) proposed that the specific attributes that make systems smart are as follows: (i) communication capability, (ii) embedded knowledge, (iii) learning capability, (iv) reasoning capability, (v) perception capability, (vi) control capability, (viii) producing new properties by emergence, (ix) self-organisation, and (x) context-awareness. It is a pity that the authors did not discuss what additional or different capabilities intelligent systems would have.
The last reflection is very personal, but important. Even if someone has been involved in research and implementation, has a broad overview of the domain, and critically monitors the latest development in the literature, it is very challenging to cover everything and to take an objective position concerning the design of next-generation CPSs. Therefore, this contribution to the Anniversary Special Issue of IJDPS cannot be regarded as a critical survey paper, but only as an incomplete and subjective personal position paper. The above sections tried to depict the current situation, to cast light on some general issues, and to point at some foreseeable general trends, needs, and opportunities. The author knows that many things have been left out or have not been addressed in sufficient depths, but including more would have needed a team of authors and perhaps a contract for a multi-volume book.
5.2Concluding propositions
This position paper elaborated on a selected set of topical issues and influential factors that the authors thought to be important for designing next-generation cyber-physical systems. The author argues that it is not simple to see the future due to: (i) the emerging technological affordances, (ii) the disciplinary heterogeneities, (iii) the shift of the paradigm of CPSs, (iv) the increasing functional complexities, and (v) the uncertainty related to the paradigmatic systems features of NG-CPSs.
• The science of cyber-physical systems is still in an early stage. Though it is claimed to be a multi-disciplinary domain, the included disciplines are keeping their traditions and cultures. The future of CPSs will be influenced strongly by their intellectualization, adaptation and automation, and by the new concepts of smart co-design and cognitive engineering.
• Many authors arrived at the conclusion that the currently available definitions of intelligent and smart CPSs are diverse and inconsistent. However, due to the low-level influence of the notional definitions on the daily practice of system implementation, there is no trigger to make steps towards a unified terminology. On the other hand, scientific rigour calls for a shared vocabulary and less ambiguous definitions for NG-CPSs.
• The paradigms of CPSs seem to change quickly. While 0G-CPSs completed their task under external human control, 1G-CPSs operate under self-regulation and are able to make self-tuning. The current literature principally agrees that 2G-CPS equipped with the capability of self-awareness and making self-adaptation in multiple forms. The capabilities of the higher generation CPSs have been described only tentatively and somewhat bewilderingly.
• The largest differences are in the disciplinary approaches of functional design concerning the hardware, software, and cyberware constituents of CPSs. This is largely influenced by the traditions. Further research is needed to learn if a methodological homogenization (i) is indeed necessary, (ii) in what form it is needed, and (iii) what advantages it can deliver from a theoretical and a practical point of view.
• Theoretical clarification and taxonomical classification of paradigmatic systems features are not in the focus of current research. On the other hand, such theoretical underpinning could offer opportunities, for instance, to (i) better demarcate the generations of CPSs, (ii) develop active ontologies which could in turn support design automation, and (iii) knowledge-intensive computational tools for functional design, analysis of operational processes, and simulation of behaviour in contexts.
• The short history of the CPS paradigm and the heterogeneity of applications (manufacturing, energy, production, medical, transportation, aerospace, automotive, marine, etc.) partially explain the lack of universal underpinning theories, uniform design methodologies, and integrated tool packages. The available domain specific languages do not reduce or eliminate the design challenges of specific design domains. Follow up research needs to deal with the design methodology of smart CPSs from a genuinely ultra-disciplinary perspective.
• The maxim ‘cyber-physical systems for everyone’ is not just an emptyslogan. Moving from the products economy through the service economy towards an experience economy, smart CPSs can indeed provide benefit for all. However, the attitude of system designers should change from comprehensive automation to customized cooperation. The experiences gained in the context of cooperating robotics need to be projected to the whole field of non-anthropomorphic utility systems.
• Smart CPSs profit from the problem-solving methods of artificial narrow intelligence. It is already signalized in the literature that dedicated, system-level reasoning mechanisms, which are able to manage complicated real life cases, such as: (i) autonomic parking of a car, (ii) supporting stroke rehabilitation at home, (iii) managing operations in surgical theatres, or (iv) enforcing safety rules on crowds, etc. will also be needed. More attention is to be paid to the issue and implementation of para-functional capabilities and their synergistic blending with the regular functional capabilities.
• Real time big data processing has a large influence on the control and operation of smart CPSs. Massive data sets and streams lend themselves to informing, modelling, planning, and supervising –just to mention few activities. It is a hot research issue how the concept of digital twins (i) can be exploited in verification and validation of system performance and dependability in the design stage, and (ii) can be used in system assurance and optimization in the run-time stage. The balance of the efforts, investments, and complexity, on one side, and the gains, returns, and computability, on the other side, needs further investigations.
• There seems to be an explosion in terms of publications that address various conceptual and computational issues of self-supervised self-adaptation of CPSs at run-time. Without any doubt, this is the most fundamental and vital contribution to the realization of smart systems. The literature raises the feeling that a generic conceptual solution is still to come, if possible at all. There is an innate complexity here due to the many dimensions and aspects of self-adaptation, and the needed high-level and dependable intellectualization of such system.
• Though the importance of solving the issue of direct cooperation of humans with smart CPSs, as well as of socialized cooperation of these systems is recognized in the literature, the problematics has been treated only at the level of general conceptual frameworks or of context-specific (non-generalizable solutions. This applies to semantic, pragmatic, and apobetic cooperation as well. Simultaneous consideration of cooperation domains, modalities and levels is complicated not only due to the lack of effective methodologies but also due to the immature and disjoint underpinning theories.
• As documented in the literature, the idea of socialization of systems first emerged in the domain of collaborative robot research and development. Many authors argued that socialized robots should exhibit the major human social characteristics. The current research efforts concentrate on getting insights and understanding the several various phenomena associated with socialization of systems, and is yet not in the position of offering concrete and tested design rules and principles. Naturalization of smart CPSs seems to be proper only as a longer-term research objective.
• Efforts are being made in the current research to (i) investigate non-functional characteristics (security, safety, dependability, privacy, etc.), and (ii) opportunities of reproducing complex human emotions (empathy, trust, attachment, love, etc.) by of NG-CPSs. Two interesting strands of research are proxemics (Mead & Matarić, 2016) and lovotics (Samani et al., 2010), but consciousness is not a taboo either (Wiedermann & van Leeuwen, 2021). By utilizing fundamental concepts from psychology, biology, neuroscience, robotics, and computing, these are pioneering trans-disciplinary research in NG-CPSs.
• If science and society set the realization of truly intelligent cyber-physical systems as the destination, then it will be reachable on a long, curvy and bumpy ranch road only, which runs between the deep diches of substituting or mimicking human-like general consciousness and autonomous non-biological reproduction capability, respectively. This journey will also be accompanied by teleological and philosophical debates.
• Though not addressed in details in this position paper, the author also considers the issue of aggregation, management, and exploitation of the growing amount of synthetic systems knowledge produced by NG-CPSs as a novel sympérasmological and praxiological concern, and encourages more theoretical and methodological research into this direction.
Author Biography
Dr. Imre Horváth is a professor emeritus of the Faculty of Industrial Design Engineering, Delft University of Technology, the Netherlands. In recent years, his research group has focused on the researchand education of smart cyber-physical system design, with special attention to cognitive engineering and prototype systems for personal and social applications. Prof. Horváth is also interested in systematic design research methodologies. He was a promoter of more than 25 Ph.D. students. He is the first author or co-author of more than 440 publications. He has received five best paper awards for his scientific work and has a wide range of society memberships and contributions. He was the past chair of the Executive Committee of the CIE Division of ASME. Since 2011, he has been a fellow of ASME. He is a member of the Royal Dutch Institute of Engineers and also involved in the Society for Design and Process Science. He received honorary doctor titles from two universities and the Pahl-Beitz ICONNN award for outstanding international contributions to design science and education. He was conferred the Lifetime Achievement Award by ASME’s CIE Division in 2019. He has served several international journals as an editor and initiated the International Tools and Methods of Competitive Engineering (TMCE) Symposia series. He was editor-in-chief of the Journal Computer Aided Design over 12 years. He is an associate editor of the Journal of Engineering Design, a co-editor-in-chief of the Journal of Integrated Design and Process Science, and served more than 10 journals as registered reviewer. His current research interests include various philosophical, methodological, and computational aspects of smart products, systems, and service design, as well as synthetic knowledge science, sympérasmology, and the development of self-evolving systems.
References
1 | Ackoff, R.L. ((1964) ) General system theory and systems research: Contrasting conceptions of systems science. In: Views on General Systems Theory, Plenum Press, New York-London, pp. 51–60. |
2 | Ackoff, R.L. . ((1991) ) Science in the systems age: Beyond IE, OR, and MS. In: Facets of Systems Science, Springer US, pp. 325–335. |
3 | Aheleroff, S. , Xu, X. , Zhong, R.Y. , Lu, Y. ((2021) ) Digital twin as a service (DTaaS) in Industry.: An architecture reference model, Advanced Engineering Informatics 47: (101225), 1–15. |
4 | Ahmad, A. , Paul, A. , Rathore, M.M. , Chang, H. ((2016) ) Smart cyber society: Integration of capillary devices with high usability based on cyber–physical system, Future Generation Computer Systems 56: , 493–503. |
5 | Ahmadi, H. , Abdelzaher, T. , Han, J. , Pham, N. , Ganti, R.K. ((2011) ) The sparse regression cube: A reliable modeling technique for open cyber-physical systems. In: Proceedings of the IEEE/ACM Second International Conference on Cyber-Physical Systems, IEEE, pp.87-96. |
6 | Ansari, F. , Khobreh, M. , Seidenberg, U. , Sihn, W. A problem-solving ontology for human-centered cyber physical production systems, CIRP Journal of Manufacturing Science and Technology ((2018) ) 22: , 91–106. |
7 | Ashby, W.R. Design for a brain: The origin of adaptive behavior. Chapman and Hall, London. |
8 | Ayerdi, J. , Garciandia, A. , Arrieta, A. , Afzal, W. , Enoiu, E. , Agirre, A. , Sellin O. (2020). Towards a taxonomy for eliciting design operation continuum requirements of cyber-physical systems. In: Proceedings of the 28th International Requirements Engineering Conference, IEEE, pp. 280-290. |
9 | Bakirtzis, G. , Vasilakopoulou, C. , Fleming, C.H. 2021). Compositional cyber-physical systems modeling. arXiv preprint arXiv:2101.10484. 125-138. |
10 | Barricelli, B.R. , Casiraghi, E. , Fogli, D. ((2019) ) A survey on digital twin: Definitions, characteristics, applications, and design implications, IEEE Access 7: , 167653–167671. |
11 | Baxter, G. , Sommerville, I. ((2011) ) Socio-technical systems: From design methods to systems engineering, Interacting with Computers 23: (1), 4–17. |
12 | Beckers, R. , Holland, O.E. , Deneubourg, J.L. , ((2000) ) From local actions to global tasks: Stigmergy and collective robotics. In: Prerational Intelligence: Adaptive Behavior and Intelligent Systems Without Symbols and Logic, Springer, Dordrecht, pp. 1008–1022. |
13 | Berberian, B. , Sarrazin, J.C. , Le Blaye P. , Haggard, P. ((2012) ) Automation technology and sense of control: A window on human agency, PLoS One 7: (3), e34075. |
14 | Blackburn, M.R. , Austin, M.A. , Coelho, M. (2018). Modeling and cross-domain dependability analysis of cyber-physical systems. In: Proceedings of the 2018 Annual IEEE International Systems Conference, IEEE, pp. 1-8. |
15 | Boje, C. , Guerriero, A. , Kubicki, S. , Rezgui, Y. ((2020) ) Towards a semantic construction digital twin: Directions for future research, Automation in Construction 114: , 1–16. |
16 | Bostrom, N. ((2005) ) A history of transhumanist thought, Journal of Evolution and Technology 14: (1), 1–25. |
17 | Breazeal, C. ((2003) ) Toward sociable robots, Robotics and Autonomous Systems 42: (3-4), 167–175. |
18 | Broo, D.G. , Boman, U. , Törngren, M. ((2021) ) Cyber-physical systems research and education in: Scenarios and strategies, Journal of Industrial Information Integration 21: , 100192. |
19 | Brun, Y. , Di MarzoSerugendo G. , Gacek, C. , Giese, H. , Kienle, H. , Litoiu, M. , Muller, H. , Pezze, M. , Shaw, M. . Engineering self-adaptive systems through feedback loops. In: Software Engineering for Self-Adaptive Systems, Springer, Berlin Heidelberg, pp. 48–70. |
20 | Bugental, D.B. , Grusec, J.E. . ((2007) ). Chapter 7: Socialization processes. In: Handbook of Child Psychology, 6th Edition, John Wiley & Sons, Inc., Hoboken, NJ, Vol. 3, pp. 366–428. |
21 | Bures, T. , Matena, V. , Mirandola, R. , Pagliari, L. , Trubiani, C. (2018). Performance modelling of smart cyber-physical systems. In: Companion of the 2018 ACM/SPEC International Conference on Performance Engineering, pp. 37-40. |
22 | Cai, Z. , Zheng, X. ((2018) ) A private and efficient mechanism for data uploading in smart cyber-physical systems, IEEE Transactions on Network Science and Engineering 7: (2), 766–775. |
23 | Calvano, C.N. , John, P. ((2004) ) Systems engineering in an age of complexity, Systems Engineering 7: (1), 25–34. |
24 | Cardon, A. ((2006) ) Artificial consciousness, artificial emotions, and autonomous robots, Cognitive Processing 7: (4), 245–267. |
25 | Carreras Guzman, N.H. , Wied, M. , Kozine, I. , Lundteigen, M.A. ((2020) ) Conceptualizing the key features of cyber-physical systems in a multi-layered representation for safety and security analysis, Systems Engineering 23: (2), 189–210. |
26 | Castro, S. , Mosterman, P.J. , Rajhans, A.H. , Valenti, R.G. (2019). Challenges in the operation and design of intelligent cyber-physical systems. In: Complexity Challenges in Cyber Physical Systems: Using Modeling and Simulation to Support Intelligence, Adaptation and Autonomy pp. 27-51. |
27 | Checkland, P.B. . ((1991) ) Science and the systems paradigm. In: Facets of Systems Science, Springer, US, pp. 259–268. |
28 | Chen, H. ((2017) ) Applications of cyber-physical system: A literature review, Journal of Industrial Integration and Management 2: (03), 1750012. |
29 | Cheng, C.H. , Shankar, N. , Ruess, H. , Bensalem, S. (2013)EFSMT: A logical framework for cyber-physical systems. arXiv preprint arXiv:1306.3456. |
30 | Cheng, S.W. , Garlan, D. , Schmerl, B. , Sousa, J.P. , Spitznagel, B. , Steenkiste, P. , Hu, N. . ((2002) ). Software architecture-based adaptation for pervasive systems. In: Proceedings of the International Conference on Architecture of Computing Systems, Springer, Berlin, Heidelberg, pp. 67–82. |
31 | Chu, Y. , You, F. ((2015) ) Model-based integration of control and operations: Overview, challenges, advances, and opportunities, Computers & Chemical Engineering83: , 2–20. |
32 | Cogliati, D. , Falchetto, M. , Pau, D. , Roveri, M. , Viscardi, G. (2018). Intelligent cyber-physical systems for industry 4.0. In: Proceedings of the First International Conference on Artificial Intelligence for Industries, IEEE, 19-22. |
33 | Colombo, A.W. , Karnouskos, S. , Kaynak, O. , Shi, Y. , Yin, S. ((2017) ) Industrial cyberphysical systems: A backbone of the fourth industrial revolution, IEEE Industrial Electronics Magazine 11: (1), 6–16. |
34 | Cosier, G. , Whittaker, S. ((2001) ) Reconnecting bits and atoms, BT Technology Journal 19: (4), 77–97. |
35 | CPSoS. ((2015) ) Cyber-physical systems of systems: Research and innovation priorities initial document for public consultation, European Union’s Seventh Program 611115: , 1–21. |
36 | CPSoS (2016). Towards a European roadmap on research and innovation in engineering and management of cyber-physical systems of systems. 1-62. |
37 | Dautenhahn, K. , Billard, A. (1999). Bringing up robots or - the psychology of socially intelligent robots: From theory to implementation. In: Proceedings of the Third Annual Conference on Autonomous Agents, pp. 366-367. |
38 | De Niz Villasenor, D. (2004). Modeling functional and para-functional concerns in embedded real-time systems (Doctoral dissertation, Carnegie Mellon University), pp. 1-287. |
39 | De Niz Villasenor, D. , Rajkumar, R. (2003). Model-based embedded real-time software development. In: Proceedings of 9th Real-Time and Embedded Technology and Applications Symposium, IEEE, pp. 1-6. |
40 | Delicato, F.C. , Al-Anbuky, A. , Kevin, I. , Wang, K. ((2020) ) Editorial: Smart cyber–physical systems: Toward pervasive intelligence systems, Future Generation Computer Systems 107: (6), 1134–1139. |
41 | Dellermann, A. , Calma, N. , Lipusch, T. , Weber, S. , Weigel, S. , Ebel, P. , (2019b), The future of human-ai collaboration: A taxonomy of design knowledge for hybrid intelligence systems. In: Proceedings of the 52nd Hawaii International Conference on System Sciences, HICSS, Hawaii, USA, pp. 274-283. |
42 | Dellermann, D. , Ebel, P. , Söllner, M. , Leimeister, J.M. , ((2019) ) (a). Hybrid intelligence, Business & Information Systems Engineering 61: (5), 637–643. |
43 | Díaz, J. , Pérez, J. , Pérez, J. , Garbajosa, J. (2016). Conceptualizing a framework for cyber-physical systems of systems development and deployment. In: Proceedings of the 10th European Conference on Software Architecture Workshops, pp. 1-7. |
44 | Doyle, M.J. , Watz, E. , Portrey, A.M. (2015). Mergingworlds: Complex adaptive systems science meets systems engineering. In: Proceedings of the 48th Annual Simulation Symposium, Society for Computer Simulation International, pp. 86-93. |
45 | Duffy, B.R. ((2006) ) Fundamental issues in social robotics, The International Review of Information Ethics 6: , 31–36. |
46 | Dumitrache, I. ((2010) ) The next generation of cyber-physical systems, Journal of Control Engineering and Applied Informatics 12: (2), 3–4. |
47 | Dumitrache, I. , Sacala, I.S. , Moisescu, M.A. , Caramihai, S.I. ((2017) ) A conceptual framework for modeling and design of cyber-physical systems, Studies in Informatics and Control 26: (3), 325–334. |
48 | Dunne, A. ((2006) ) Hertzian tales: Electronic products, aesthetic experience, and critical design. MIT Press, Cambridge, MA, pp. 1–175. |
49 | Dybå, T. , Dingsøyr, T. ((2008) ) Empirical studies of agile software development: A systematic review, Information and Software Technology 50: (9-10), 833–859. |
50 | Eberhardinger, B. , Seebach, H. , Knapp, A. , Reif, W. ((2014) ). Towards testing self-organizing, adaptive systems. In: Proceedings of the IFIP International Conference on Testing Software and Systems, Springer, Berlin Heidelberg, pp. 180–185. |
51 | Elkhodary, A. , Esfahani, N. , Malek, S. 2010). FUSION: A framework for engineering self-tuning self-adaptive 1118 software systems. In: Proceedings of the 18th ACM SIGSOFT International Symposium on Foundations of Software Engineering, ACM, pp. 7-16. |
52 | Engell, S. , Paulen, R. , Reniers, M. A. , Sonntag, C. , Thompson, H. ((2015) ). Core research and innovation areas in cyber-physical systems of systems. In: Cyber Physical Systems, Design, Modeling, and Evaluation, Springer International Publishing, pp. 40–55. |
53 | Escobar, L. , Carvajal, N. , Naranjo, J. , Ibarra, A. , Villacís, C. , Zambrano, M. , Galárraga, F. (2017). Design and implementation of complex systems using mechatronics and cyber-physical systems approaches. In: Proceedings of the 2017 IEEE International Conference on Mechatronics and Automation, IEEE, pp. 147-154. |
54 | Falkenberg, R. , Drenhaus, J. , Sliwa, B. , Wietfeld, C. (2018). System-in-the-loop design space exploration for efficient communication in large-scale iot-based warehouse systems. In: Proceedings of the Annual IEEE International Systems Conference, IEEE, pp. 1-6. |
55 | Feil-Seifer, D.J. , Matarić, M.J. (2009). Human-robot interaction. In: Encyclopedia of Complexity and Systems Science, pp. 4643-4659. |
56 | Fong, T. , Nourbakhsh, I. , Dautenhahn, K. ((2003) ) A survey of socially interactive robots, Robotics and Autonomous Systems 42: (3-4), 143–166. |
57 | Fresemann, C. , Lindow, K. ((2019) ) Development and operation of digital twins for technical systems and services, CIRP Annals 68: (1), 129–132. |
58 | Gabor, T. , Belzner, L. , Kiermeier, M. , Beck, M.T. , Neitz, A. (2016). A simulation-based architecture for smart cyber-physical systems. In: Proceedings of the International Conference on Autonomic Computing, IEEE, pp. 374-379. |
59 | Geels, F.W. ((2005) ) The dynamics of transitions in socio-technical systems: A multi-level analysis of the transition pathway from horse-drawn carriages to automobiles, Technology Analysis & Strategic Management 17: (4), 445–476. |
60 | Geels, F.W. , Kemp, R. ((2007) ) Dynamics in socio-technical systems: Typology of change processes and contrasting case studies, Technology in Society 29: (4), 441–455. |
61 | Gerostathopoulos, I. , Skoda, D. , Plasil, F. , Bures, T. , Knauss, A. ((2019) ) Tuning self-adaptation in cyber-physical systems through architectural homeostasis, Journal of Systems and Software 148: , 37–55. |
62 | Gerritsen, B.H. , Horváth, I. (2012). Current drivers and obstacles of synergy in cyber-physical systems design. In: Proceedings of the ASME 2012 International Design Engineering Technical Conferences, American Society of Mechanical Engineers, 1277-1286. |
63 | Gill, C.D. (2003).Avision for integration of embedded system properties - via a model-component-aspect system architecture. In: Proceedings of the Monterey Workshop, pp. 1-8. |
64 | Goebel, R. , Sanfelice, R.G. , Teel, A.R. ((2009) ) Hybrid dynamical systems, IEEE Control Systems Magazine 29: (2), 28–93. |
65 | González Nieto, J. , Reif, W. , Wang, G. , Indulska, J. ((2009) ). Autonomic and trusted computing. Lecture Notes in Computer Science 5586, Springer, Berlin/Heidelberg. |
66 | Good, I.J. ((1966) ) Speculations concerning the first ultraintelligent machine, Advances in Computers 6: , 31–88. |
67 | Goswami, D. , Schneider, R. , Masrur, A. , Lukasiewycz, M. , Chakraborty, S. , Voit, H. , Annaswamy, A. (2012). Challenges in automotive cyber-physical systems design. In: Proceedings of the 2012 International Conference on Embedded Computer Systems, IEEE, pp. 346-354. |
68 | Graziano, M.S. ((2017) ) The attention schema theory: A foundation for engineering artificial consciousness, Frontiers in Robotics and AI 4: , 60. |
69 | Grimm, M. , Anderl, R. , Wang, Y. . (2014). Conceptual approach for multi-disciplinary cyber physical systems design and engineering. In: Proceeding of the Tenth Tools and Methods of Competitive Engineering Symposium, Budapest, Hungary, pp. 63-74. |
70 | Gunes, V. , Peter, S. , Givargis, T. , Vahid, F. ((2014) ) A survey on concepts, applications, and challenges in cyber-physical systems, KSII Transactions on Internet & Information Systems 8: (12), 4242–4268. |
71 | Håkansson, A. , Hartung, R. , Moradian, E. ((2015) ) Reasoning strategies in smart cyber-physical systems, Procedia Computer Science 60: , 1575–1584. |
72 | Halme, A. , Jakubik, P. , Schonberg, T. , Vainio, M. (1993). The concept of robot society and its utilization. In: Proceedings of IEEE/Tsukuba International Workshop on Advanced Robotics, IEEE, pp. 29-35. |
73 | Hartmann, M. , Viehweger, M. , Desmet, W. , Stolz, M. , Watzenig, D. (2017). “Pedestrian in the loop”: An approach using virtual reality. In: Proceedings of the XXVI International Conference on Information, Communication and Automation Technologies, IEEE, pp. 1-8. |
74 | Hielscher, J. , Kazhamiakin, R. , Metzger, A. , Pistore, M. , ((2008) ). A framework for proactive self-adaptation of service-based applications based on online testing. In: Proceedings of the European Conference on a Service-Based Internet, Springer, Berlin, Heidelberg, pp. 122–133. |
75 | Horváth, I. (2012). Beyond advanced mechatronics: New design challenges of social-cyber-physical systems. In: Proceedings of the 1st Austrian Center of Competence in Mechatronics Workshop on Mechatronic Design, ACCM, Linz, Austria, 2012, pp. 1-20. |
76 | Horváth, I. ((2014) ). What the design theory of social-cyber-physical systems must describe, explain and predict? In: An Anthology of Theories and Models of Design, Springer, London, pp. 99–120. |
77 | Horváth, I. , Gerritsen, B.H. . (2012). Cyber-physical systems: Concepts, technologies and implementation principles. In: Proceedings of the International Tools and Methods of Competitive Engineering Symposium, Karlsruhe, Germany, Vol. 1, 2012, pp. 19-36. |
78 | Horváth, I. , Gerritsen, B.H. , (2013). Outlining nine major design challenges of open, decentralized, adaptive cyber-physical systems. In: Proceedings of the International Design Engineering Technical Conferences, ASME, Portland, OR, Vol. 55867, pp. 1-14. |
79 | Horváth, I. , Tavcar J. ((2022) ) Designing cyber-physical systems for runtime self-adaptation: Knowing more about what we miss, Transactions of the SDPS: Journal of Integrated Design and Process Science 25: (2), 1–26. |
80 | Horváth, I. , Wang, J. (2015). Towards a comprehensive theory of multi-aspect interaction with cyber physical systems. In: Proceedings of the International Design Engineering Technical Conferences (Vol. 57052), ASME, pp. 1-14. |
81 | Horváth, I. , Rusák, Z. , Li, Y. (2017). Order beyond chaos: Introducing the notion of generation to characterize the continuously evolving implementations of cyber-physical systems. In: Proceedings of the International Design Engineering Technical Conferences, ASME, pp. 1-16. |
82 | Horváth, I. (2021). Connectors of smart design and smart systems. Artificial Intelligence for Engineering Design, Analysis and Manufacturing, 1-19. |
83 | Hudak, P. , ((2022) ) (a). Para-functional programming, Computer 8: (19), 60–70. |
84 | Hudak, P. , ((2022) ) Denotational semantics of a para-functional programming language, International Journal of Parallel Programming 15: (2), 103–125. |
85 | IBM. ((2006) ) An architectural blueprint for autonomic computing. IBM, IBM White Paper 31: , 1–6. |
86 | Iglesias, A. , Lu, H. , Arellano, C. , Yue, T. , Ali, S. , Sagardui, G. , (2017). Product line engineering of monitoring functionality in industrial cyber-physical systems: A domain analysis. In: Proceedings of the 21st International Systems and Software Product Line Conference, Vol. A, pp. 195-204. |
87 | Isermann, R. ((1996) ) Modeling and design methodology for mechatronic systems, IEEE/ASME Transactions on Mechatronics 1: (1), 16–28. |
88 | Ishii, H. , Ullmer, B. (1997). Tangible bits: Towards seamless interfaces between people, bits and atoms. In: Proceedings of the ACM SIGCHI Conference on Human Factors in Computing Systems ACM, pp. 234-241. |
89 | Jones, D. , Snider, C. , Nassehi, A. , Yon, J. , Hicks, B. ((2020) ) Characterising the digital twin: A systematic literature review, CIRP Journal of Manufacturing Science and Technology 29: , 36–52. |
90 | Jones, P.M. , Chu, R.W. , Mitchell, C.M. ((1995) ) A methodology for human-machine systems research: Knowledge engineering, modeling, and simulation, IEEE Transactions on Systems, Man, and Cybernetics 25: (7), 1025–1038. |
91 | Kampis, G.Y. ((1991) ). Self- modifying systems in biology and cognitive science:Anewframework for dynamics, information and complexity. Pergamon Press, Oxford, pp. 1–542. |
92 | Kang, W. , Kapitanova, K. , Son, S.H. ((2012) ) RDDS: A real-time data distribution service for cyber-physical systems, IEEE Transactions on Industrial Informatics 8: (2), 393–405. |
93 | Kephart, J.O. , Chess, D.M. ((2003) ) The vision of autonomic computing, Computer36: (1), 41–50. |
94 | Kitamura, Y. , Mizoguchi, R. (1999). Meta-functions of artifacts. In: Proceedings of the 13th International Workshop on Qualitative Reasoning, pp. 136-145. |
95 | Kopetz, H. , Bondavalli, A. , Brancati, F. , Frömel, B. , Höftberger, O. , Iacob, S. ((2016) ). Emergence in cyber-physical systems-of-systems (CPSoSs). In: Cyber-Physical Systems of Systems, Springer, Cham, pp. 73–96. |
96 | Koulamas, C. , Kalogeras, A. ((2018) ) Cyber-physical systems and digital twins in the industrial internet of things [cyber-physical systems], Computer 51: (11), 95–98. |
97 | Krupitzer, C. , Breitbach, M. , Roth, F.M. , VanSyckel, S. , Schiele, G. , Becker, C. ((2018) ) A survey on engineering approaches for self-adaptive systems. (extended version, Pervasive and Mobile Computing 17: (B), 1–33. |
98 | Lee, E.A. (2007). Computing foundations and practice for cyber-physical systems: A preliminary report. Technical Report UCB/EECS-2007-72, EECS Department, University of California, Berkeley, pp. 1-27. |
99 | Lee, K.M. , Park, N. , Song, H. ((2005) ) Can a robot be perceived as a developing creature? Effects of a robot’s long-term cognitive developments on its social presence and people’s social responses toward it, Human Communication Research 31: (4), 538–563. |
100 | Legatiuk, D. , Theiler, M. , Dragos, K. , Smarsly, K. ((2017) ). A categorical approach towards meta modeling cyber-physical systems. In: Proceedings of the 11th International Workshop on Structural Health Monitoring, 9: (12), Stanford, CA, USA, pp. 1–8. |
101 | Li, N. , Chen, Z. , Li, Z.L. , Jiao, W. (2019). A conceptual model of self-adaptive systems based on attribution theory. In: CogSci, pp. 657-663. |
102 | Lim, K.Y. , Zheng, P. , Chen, C. , ((2020) ) A state-of-the-art survey of digital twin: Techniques, engineering product lifecycle management and business innovation perspectives, Journal of Intelligent Manufacturing 31: , 1–32. |
103 | Ma, J. , Ning, H. , Huang, R. , Liu, H. , Yang, L.T. , Chen, J. , Min, G. ((2015) ) Cybermatics: A holistic field for systematic study of cyber-enabled new worlds, IEEE Access 3: , 2270–2280. |
104 | Mainzer, K. , ((2014) ). From robotics to cyber-physical systems: Technical options and ethical-legal challenges. In: Rethinking Responsibility in Science and Technology, Pisa University Press, Pisa, pp. 87–112. |
105 | Malavolta, I. , Muccini, H. , Sharaf, M. (2015). A preliminary study on architecting cyber-physical systems. In: Proceedings of the 2015 European Conference on Software Architecture Workshops, pp. 1-6. |
106 | Marwedel, P. ((2021) ). Embedded system design: Embedded systems foundations of cyber-physical systems, and the internet of things. Fourth Edition. Springer Nature AG, Cham, pp. 1–446. |
107 | McKinley, P.K. , Sadjadi, S.M. , Kasten, E.P. , Cheng, B.H. ((2004) ) Composing adaptive software, Computer 37: (7), 56–64. |
108 | Mead, R. , Matarić, M.J. ((2016) ). Perceptual models of human-robot proxemics. In: Experimental RoboticsSpringer, Cham, pp. 261–276. |
109 | Mellor, S.J. , Scott, K. , Uhl, A. , Weise, D. ((2004) ). MDA distilled, Addison-Wesley, Amsterdam, The Netherlands. |
110 | Miller, D.P. (1998). Assistive robotics: An overview. In: Assistive Technology and Artificial Intelligence, LNAI , pp. 126-136. |
111 | Molina, E. , Jacob, E. ((2018) ) Software-defined networking in cyber-physical systems: A survey, Computers & Electrical Engineering 66: , 407–419. |
112 | Moreland, R.L. , (1982). Socialization in small groups: Temporal changes in individual-group relations. In: Advances in Experimental Social Psychology, Academic Press, 15, pp. 137-192. |
113 | Muccini, H. , Vaidhyanathan, K. (2019). A machine learning-driven approach for proactive decision making in adaptive architectures. In: Proceedings of the International Conference on Software Architecture Companion, IEEE, pp. 242-245. |
114 | Muccini, H. , Sharaf, M. , Weyns, D. (2016). Self-adaptation for cyber-physical systems: A systematic literature review. In: Proceedings of the 11th International Symposium on Software Engineering for Adaptive and Self-Managing Systems, ACM, pp. 75-81. |
115 | Müller, H.A. ((2017) ) The rise of intelligent cyber-physical systems, Computer 50: (12), 7–9. |
116 | N.N. ((2009) ). Cyber-physical systems - A concept map. At: https://ptolemy.berkeley.edu/projects/cps/. |
117 | Nallur, V. , Bahsoon, R. ((2012) ) A decentralized self-adaptation mechanism for service-based applications in the cloud, IEEE Transactions on Software Engineering 39: (5), 591–612. |
118 | Nikolakis, N. , Maratos, V. , Makris, S. ((2019) ) A cyber physical system (CPS) approach for safe human-robot collaboration in a shared workplace, Robotics and Computer-Integrated Manufacturing 56: , 233–243. |
119 | Özbek, N.S. (2020). Co-design approach and co-simulation tools for networked cyber-physical control systems. In: Proceedings of the International Conference on Innovation and Intelligence for Informatics, Computing and Technologies, IEEE, pp. 1-6. |
120 | Poovendran, R.A. ((2010) ) Cyber–physical systems: Close encounters between two parallel worlds [point of view], Proceedings of the IEEE 98: (8), 1363–1366. |
121 | Pourtalebi, S. , Horváth, I. ((2016) ) Towards a methodology of system manifestation features-based pre-embodiment design, Journal of Engineering Design 27: (4-6), 232–268. |
122 | Putnik, G.D. , Ferreira, L. , Lopes, N. , Putnik, Z. ((2019) ) What is a cyber-physical system: Definitions and models, FME Transactions 47: (4), 663–674 spectrum. |
123 | Qi, Q. , Zhao, D. , Liao, T.W. , Tao F. (2018). Modeling of cyber-physical systems and digital twin based on edge computing, fog computing and cloud computing towards smart manufacturing. In: Proceedings of ASME 13th International Manufacturing Science and Engineering Conference, College Station, TX, ASME, New York, pp. 1-x. |
124 | Quadri, I. , Bagnato, A. , Brosse, E. , Sadovykh, A. ((2015) ) Modeling methodologies for cyber-physical systems: Research field study on inherent and future challenges, Ada User Journal 36: (4), 246–253. |
125 | Rao, G.P. , Unbehauen, H. ((2006) ) Identification of continuous-time systems, IEE Proceedings - Control Theory and Applications 153: (2), 185–220. |
126 | Rivera, L.F. , Jiménez, M. , Tamura, G. , Villegas, N.M. , Müller, H.A. (2021). Designing run-time evolution for dependable and resilient cyber-physical systems using digital twins. Journal of Integrated Design and Process Science, (Preprint), 1-32. |
127 | Rodrigues, A. , Caldas, R.D. , Rodrigues, G.N. , Vogel, T. , Pelliccione, P. (2018). A learning approach to enhance assurances for real-time self-adaptive systems. In: Proceedings of the 13th International Symposium on Software Engineering for Adaptive and Self-Managing Systems, IEEE/ACM, pp. 206-216. |
128 | Romero, F. , Sanfilippo, E.M. , Rosado, P. , Borgo, S. , Benavent, S. ((2019) ) Feature in product engineering with single and variant design approaches. A comparative review, Procedia Manufacturing 41: , 328–335. |
129 | Romero, M. , Guédria, W. , Panetto, H. , Barafort, B. ((2020) ) Towards a characterisation of smart systems: A systematic literature review, Computers in Industry 120: , 1–23. |
130 | Ropohl, G. ((1999) ) Philosophy of socio-technical systems.: Research in Philosophy and Technology, Techná 4: (3), 186–194. |
131 | Ross, D.T. , Goodenough, J.B. , Irvine, C.A. ((1975) ) Software engineering: Process, principles, and goals, Computer 8: (5), 17–27. |
132 | Roy, D. , Balszun, M. , Heurung, T. , Chakraborty, S. , Naik, A. (2018). Waterfall is too slow, let’s go agile: Multi-domain coupling for synthesizing automotive cyber-physical systems. In: Proceedings of the 2018 IEEE/ACM International Conference on Computer-Aided Design, IEEE, pp. 1-7. |
133 | Saberi, S. , Kouhizadeh, M. , Sarkis, J. , Shen, L. ((2019) ) Blockchain technology and its relationships to sustainable supply chain management, International Journal of Production Research 57: (7), 2117–2135. |
134 | Salehie, M. , Tahvildari, L. ((2009) ) Self-adaptive software: Landscape and research challenges, ACM Transactions on Autonomous and Adaptive Systems 4: (2), 1–42. |
135 | Samani, H.A. , Cheok, A.D. , Ngiap, F.W. , Nagpal, A. , Qiu, M. (2010). Towards a formulation of love in human-robot interaction. In: Proceedings of the 19th International Symposium in Robot and Human Interactive Communication, IEEE, pp. 94-99. |
136 | Sarmah, S.S. ((2018) ) Understanding blockchain technology, Computer Science and Engineering 8: (2), 23–29. |
137 | Schmidt, D.C. ((2002) ) Middleware for real-time and embedded systems, Communications of ACM 45: (6), 43–48. |
138 | Schruben, L.W. (2000). Mathematical programming models of discrete event system dynamics. In: Proceedings of the Winter Simulation Conference (Vol. 1), IEEE, pp. 381-385. |
139 | Schwaber, K. , Beedle, M. (2002). Agile software development with Scrum (Vol. 1). Prentice Hall, Upper Saddle River. |
140 | Shabbir, J. , Anwer, T. (2018). Artificial intelligence and its role in near future. arXiv preprint arXiv:1804.01396. |
141 | Sharma, A. , Kosasih, E. , Zhang, J. , Brintrup, A. , Calinescu, A. (2020). Digital twins: State of the art theory and practice, challenges, and open research questions. arXiv preprint arXiv:2011.02833. |
142 | Shein, W.W. , Tan, Y. , Lim, A.O. (2012). PID controller for temperature control with multiple actuators in cyber-physical home system. In: Proceedings of the 15th International Conference on Network-Based Information Systems, IEEE, pp. 423-428. |
143 | Sheth, A. , Anantharam, P. , Henson, C. ((2013) ) Physical-cyber-social computing: An early st century approach, IEEE Intelligent Systems 28: (1/2), 79–82. |
144 | Shevtsov, S. , Weyns, D. , Maggio, M. ((2019) ) SimCA*: A control-theoretic approach to handle uncertainty in self-adaptive systems with guarantees, ACM Transactions on Autonomous and Adaptive Systems 13: (4), 1–34. |
145 | Stark, R. , Fresemann, C. , Lindow, K. ((2019) ) Development and operation of digital twins for technical systems and services, CIRP Annals 68: (1), 129–132. |
146 | Strube, G. ((1992) ). The role of cognitive science in knowledge engineering. In: Contemporary Knowledge Engineering and Cognition, Springer, Berlin, Heidelberg, pp. 159–174. |
147 | Suh, S.C. , Tanik, U.J. , Carbone, J.N. , Eroglu, A. ((2014) ). Applied cyber-physical systems. Springer, New York. |
148 | Sztipanovits, J. , Koutsoukos, X. , Karsai, G. , Kottenstette, N. , Antsaklis, P. , Gupta, V. , Wang S. ((2012) ) Toward a science of cyber-physical system integration, In: Proceedings of the IEEE 100: (1), 29–44. |
149 | Talsania, H.N. , Raval, T.F. , Chaudhary, K.A. ((2017) ) A survey paper on cyber physical systems, International Journal for Scientific Research & Development 5: (8), 13–16. |
150 | Tan, Y. , Goddard, S. , Perez, L. C. ((2008) ) A prototype architecture for cyber-physical systems, ACM Sigbed Review 5: (1), 1–2. |
151 | Tao, F. , Qi, Q. , Wang, L. , Nee, A.Y. ((2019) ) Digital twins and cyber–physical systems toward smart manufacturing and industry.: Correlation and comparison, Engineering 5: (4), 653–661. |
152 | Tao, F. , Zhang, Y. , Cheng, Y. , Ren, J. , Wang, D. , Qi, Q. , Li, P. (2020). Digital twin and blockchain enhanced smart manufacturing service collaboration and management. Journal of Manufacturing Systems. https://doi.org/10.1016/j.jmsy.2020.11.008. |
153 | Tavcar, J. , Horváth, I. ((2018) ) A review of the principles of designing smart cyber-physical systems for run-time adaptation: Learned lessons and open issues, IEEE Transactions on Systems, Man, and Cybernetics: Systems 49: (1), 145–158. |
154 | Thomas, D. , Hristo, A. , Patrick, M. , Göbel, J.C. , Sven, F. ((2019) ) A holistic system lifecycle engineering approach - Closing the loop between system architecture and digital twins, Procedia CIRP 84: , 538–544. |
155 | Thompson, H. , Paulen, R. , Reniers, M. , Sonntag, C. , Engell, S.D. (2015). D2.4 Analysis of the state-of-the-art and future challenges in cyber-physical systems of systems. Report of the Project Towards a European Roadmap on Research and Innovation in Engineering and Management of Cyber-Physical Systems of Systems, 1-xx. |
156 | Togay, C. , (2014). Chapter 8: Axiomatic design theory for cyber-physical system. In: Applied Cyber-Physical Systems, Springer Science + Business Media, New York, NY, pp. 85-100. |
157 | Törngren, M. , Grogan, P.T. ((2018) ) How to deal with the complexity of future cyber-physical systems? Designs 2: (4), 40. |
158 | Trist, E.L. (1978). On socio-technical systems. Sociotechnical Systems: A Sourcebook, 43-57. |
159 | Trunzer, E. , Vogel-Heuser, B. , Chen, J.K. , Kohnle, M. ((2021) ) Model-driven approach for realization of data collection architectures for cyber-physical systems of systems to lower manual implementation efforts, Sensors21: (3), 1–20. |
160 | Tyszberowicz, S. , Faitelson, D. ((2020) ) Emergence in cyber-physical systems: Potential and risk, Frontiers of Information Technology & Electronic Engineering 21: (11), 1554–1566. |
161 | Umpleby, S.A. ((2008) ) Ross Ashby’s general theory of adaptive systems, International Journal of General Systems 38: (2), 231–238. |
162 | Vijayakumar, V. , Subramaniyaswamy, V. , Abawajy, J. , Yang, L. ((2019) ) Intelligent, smart and scalable cyber-physical systems, Journal of Intelligent and Fuzzy Systems 36: (5), 3935–3943. |
163 | Wakabayashi, A. , Motomura, S. , Kato, S. (2011). Communicative humanoid robot control system reflecting human body movement. In: Proceedings of the International Symposium on Micro-NanoMechatronics and Human Science, IEEE, pp. 122-127. |
164 | Wan, J. , Yan, H. , Suo, H. , Li, F. ((2011) ) Advances in cyber-physical systems research, KSII Transactions on Internet and Information Systems 5: (11), 1891–1908. |
165 | Wan, K. , Hughes, D. , Man, K.L. , Krilavicius, T. (2010). Composition challenges and approaches for cyber physical systems. In: Proceedings of the International Conference on Networked Embedded Systems for Enterprise Applications, IEEE, pp. 1-7. |
166 | Wang, H. , Tang, B. , Li, F. , Li, J. (2013). Research on cooperation mission control of AUVs based on semantic knowledge framework. In: Proceedings of the 2013 MTS/IEEE OCEANS-Bergen Conference, IEEE, pp. 1-7. |
167 | Wang, L. , Haghighi, A. ((2016) ) Combined strength of holons, agents and function blocks in cyber-physical systems, Journal of Manufacturing Systems 40: , 25–34. |
168 | Weyns, D. ((2019) ). Software engineering of self-adaptive systems. In: Handbook of Software Engineering, Springer, Cham, pp. 399–443. |
169 | Weyns, D. , Andersson, J. , Caporuscio, M. , Flammini, F. , Kerren, A. , Löwe, W. ((2021) ) A research agenda for smarter cyber-physical systems. (Preprint, Journal of Integrated Design and Process Science 25: (X), 1–21. |
170 | Wiedermann, J. , van Leeuwen, J. ((2021) ). Towards minimally conscious cyber-physical systems: A manifesto. In: Proceedings of the International Conference on Current Trends in Theory and Practice of Informatics, Springer, Cham, pp. 43–55 . |
171 | Wognum, N. , Verhagen, W.J. , Stjepandić, J. (2017). Trans-disciplinary systems as complex systems. In: Proceedings of the 24th ISPE Inc International Conference on Trans disciplinary Engineering, Vol. 5. IOS Press, pp. 745-754. |
172 | Wolf, M. , Feron, E. (2015). What don’t we know about CPS architectures? In: Proceedings of the 52nd ACM/EDAC/IEEE Design Automation Conference, IEEE, pp. 1-4. |
173 | Wolf, W. ((2009) ) Cyber-physical systems, Computer 42: (3), 88–89. |
174 | Xin, S. , Guo, Q. Sun, H. Zhang, B. Wang, C. Chen, J. ((2015) )Cyber-physical modeling and cyber-contingency assessment of hierarchical control systems, IEEE Transactions on Smart Grid 6: (5), 2375–2385. |
175 | Xu, H. , Yu, W. , Griffith, D. , Golmie, N. ((2018) ) A survey on industrial Internet of Things: A cyber-physical systems perspective, IEEE Access 6: , 78238–78259. |
176 | Xuesen, Q. , Jingyuan, Y. , Ruwei, D.A. ((1993) ) A new discipline of science - The study of open complex giant system and its methodology, Journal of Systems Engineering and Electronics 4: (2), 2–12. |
177 | Yamanobe, N. , Wan, W. , Ramirez-Alpizar, I.G. , Petit, D. , Tsuji, T. , Akizuki, S. , Hashimoto, M. , Nagata, K. , Harada, K. ((2017) ) A brief review of affordance in robotic manipulation research, Advanced Robotics 31: (19-20), 1086–1101. |
178 | Yan, H.H. , Wan, J.F. , Suo, H. ((2012) ) Adaptive resource management for cyber-physical systems, In: Applied Mechanics and Materials. Trans Tech Publications Ltd 157: , 747–751. |
179 | Yao, J. , Xu, X. , Liu, X. ((2016) ) MixCPS: Mixed time/event-triggered architecture of cyber–physical systems, Proceedings of the IEEE 104: (5), 923–937. |
180 | Zhang, L. (2014). Modeling large scale complex cyber physical control systems based on system of systems engineering approach. In: Proceedings of the 20th International Conference on Automation and Computing, IEEE, pp. 55-60. |
181 | Zheng, C. , Le Duigou, J. , Hehenberger, P. , Bricogne, M. , Eynard, B. (2016). Multidisciplinary integration during conceptual design process: A survey on design methods of cyber-physical systems. In: Proceedings of the 14th International Design Conference - Design 2016, Dubrovnik, Croatia, pp. 1625-1634. |
182 | Zhou, P. , Zuo, D. , Hou, K. M. , Zhang, Z. , Dong, J. , Li, J. , Zhou, H. ((2019) ) A comprehensive technological survey on the dependable self-management CPS: From self-adaptive architecture to self-management strategies, Sensors 19: (5), 1033. |
183 | Zhou, P. , Zuo, D. , Hou, K.M. , Zhang, Z. ((2017) ) A decentralized compositional framework for dependable decision process in self-managed cyber physical systems, Sensors 17: (11), 2580. |
184 | Zhuge, H. ((2011) ) Semantic linking through spaces for cyber-physical-socio intelligence: A methodology, Artificial Intelligence 175: (5-6), 988–1019. |

