
Isomorphism Between Two Vector General Fuzzy Automata
Abstract
In this paper, at first, we define the notion of general fuzzy automaton over a field; we call this automaton vector general fuzzy automaton (VGFA). Moreover, we present the concept of max-min vector general fuzzy automaton. We show that if two max-min VGFA are similar, they constitute an isomorphism. After that, we prove that if two VGFA constitute an isomorphism with threshold α, they are equivalent with threshold α, where
1Introduction
Theoretical computer science is the mathematical study of models of computation. As such, it originated in the 1930s, well before the existence of modern computers, in the work of the logicians Church, Godel, Kleene, Post, and Turing. This early work has had a profound influence on the practical and theoretical development of computer science. Not only has the Turing machine model proved essential for theory, but the work of these pioneers presaged many aspects of computational practice that are now commonplace and whose intellectual antecedents are typically unknown to users. Control theory is a branch of mathematics that deals with the behaviour of dynamical systems studied in terms of inputs and outputs.
Automata theory is one of the longest-established areas in computer science. Standard applications of automata theory include pattern matching, syntax analysis, and formal verification. In recent years, novel applications of automata-theoretic concepts have emerged from numerous sciences, like biology, physics, cognitive sciences, control, linguistics, and biology. For more information, see Aceto et al. (2007), Cassandras and Lafortune (2009), Shamsizadeh et al. (2020), Dovier et al. (2004), Even (1965), Roggenbach and Majster-Cederbaum (2000), Shamsizadeh et al. (2016), Shamsizadeh and Zahedi (2019). Directable automata were introduced in Starke (1969), and also definite automata by Kleene (1956). Wee (1967) and Santos (1968) have introduced the idea of fuzzy automata. Accordingly, fuzzy finite automata have been applied in many areas, such as learning systems, the model of computing with words, pattern recognition, lattice-valued fuzzy finite automata, and clinical monitoring, and also used as models of machine learning systems (Ying, 2002; Li and Shi, 2000). In general, fuzzy automata have provided an attractive systematic way of generalizing discrete applications (Cattaneo et al., 1997; Doostfatemeh and Kremer, 2003; Reiter, 2002; Srivastava and Tiwari, 2002). Moreover, fuzzy automata developed capabilities that are hardly achievable by other tools (Ying, 2002).
Several researchers have contributed to the growth of the fuzzy automata theory. Among these works, the work of Jin and his coworkers (Jin et al., 2013) is directed towards the algebraic study of fuzzy automata based on Po-monoids; the work of Abolpour and Zahedi (Abolpour et al., 2020; Abolpour and Zahedi, 2017) is directed towards the use of categorical concepts in the study of general fuzzy automata with membership values in different lattice structures; the work of Qiu (2001, 2002) is directed towards the algebraic, topological and categorical study of fuzzy automata theory based on residuated lattices; the work of Peeva (1988, 1991) relates to the study of minimizing the states of fuzzy automata and its application to study pattern recognition; the work of Pal and their coworkers (Pal et al., 2019) is directed towards the study of fuzzy automaton based on the residuated and co-residuated lattice, the work of Shamsizadeh and coworkers (Shamsizadeh et al., 2021; Raisi Sarbizhan et al., 2022; Shamsizadeh and Zahedi, 2022; Shamsizadeh, 2022) is directed towards the study of fuzzy automaton based on graph theory and multiset theory and neutrosophic sets; Ghorani, Moghari and coworkers (Ghorani and Moghari, 2022; Ghorani et al., 2022) study fuzzy tree automata based on lattice-valued.
In this paper, we define the notion of general fuzzy automaton over a field. We call this automaton vector general fuzzy automaton (VGFA). Moreover, we present the concept of max-min vector general L-fuzzy automaton. VGFA are used for generation of linear codes, detection and correction of errors, construction of testing sequence, and generation of pseudo-random sequences of numbers. They are also used in experiments that require Monte Carlo methods, in the protection of data stored in computer systems and radio location. We show that if two max-min VGFA are similar, then they constitute an isomorphism. After that, we prove that if two VGFA constitute an isomorphism with threshold α, they are equivalent with threshold α, where
2Preliminaries
In this section, we review some notions which are needed in the next section.
Definition 1
Definition 1(Mordeson and Malik, 2002).
A fuzzy finite state machine (ffsm) is a triple
As usual,
Definition 2
Definition 2(Zahedi et al., 2008).
A fuzzy finite state automaton (FFA) is a six-tuple denoted by
•
•
• R is the start state of
•
•
•
Definition 3
Definition 3(Doostfatemeh and Kremer, 2005).
A general fuzzy automaton (GFA)
•
•
•
•
•
•
•
Which means that membership value (MV) of the state•
Definition 4
Definition 4(Bag and Samanta, 2003).
Let U be a linear space over a field F. A fuzzy subset N of
1. For every
2. For every
3. For every
4. For every
5.
Example 1
Example 1(Bag and Samanta, 2003).
Let
(1)
Example 2
Example 2(Bag and Samanta, 2003).
Let
(2)
3Vector General Fuzzy Automaton
Definition 5.
Let F be a field and
(i) There exists a field F and integers
1.
2.
3.
4.
(ii) There exist a
1.
2.
3.
Which means that membership value (MV) of the state4.
Notice that5.
6.
We let the set of all transitions of
The combination of the operations of functions
Algorithm: Multi-membership resolution for transition function:
If there are several simultaneous transitions to the active state
Step 1. Input:
Step 2. For
Step 3. For
Step 4. Output: for
If there are several simultaneous outputs to the active state
Step 1. Input:
Step 2. For
Step 3. For
Step 4. Output: for
Remark 1.
For every
Definition 6.
We shall often want to refer to a finite non-empty set
(3)
The multiplication given by (3) then corresponds to just a simple position:
Definition 7.
Let
(4)
Also, for every
(5)
Actually, the fact that the VGFA acts in discrete time we will also use the notation
(6)
(7)
Notice that when we want to consider a word, we can write it as enumeration. If we have
Since field F and matrices A, B and C entirely characterize the vector general fuzzy automaton (VGFA), we shall also denote automaton by 13-tuple machine
Example 3.
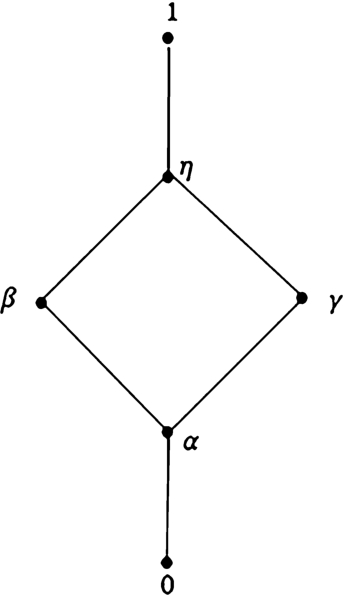
Let L be a bounded lattice as in Fig. 1. Let
4Equivalence and Isomorphism for Vector General Fuzzy Automata
Theorem 1.
Let a VGFA
1.
2.
Proof.
1. We prove the claim by induction on t. If
Definition 8.
Let
i.
ii.
iii.
iv.
Definition 9.
Let F be a field. Let
I.
II.
Actually, I and II show that
III.
We say that φ constitutes an isomorphism with threshold α if φ constitutes an a homomorphism with threshold α that is one-to-one and
Theorem 2.
Let
Proof.
Let P be a nonsingular matrix such that
The opposite of Theorem 2 is not true because there exist isomorphic VGFA which are not similar. As an illustration, let us give the following example.
Example 4.
Let L be a bounded lattice as in Fig. 1,
Definition 10.
Let
Definition 11.
Two max-min VGFAs
Theorem 3.
Let
Proof.
Let
5General Fuzzy Automaton on Fuzzy Normed Linear Space
Definition 12.
Let F be a field and
(i) There exist a field F and integers
1.
2.
3.
4.
(ii) There exist a
1.
2.
3.
where4.
We let the set of all transitions of
Remark 2.
For every
Definition 13.
Let
(8)
Also, for every
(9)
Example 5.
Let
6Conclusion
General fuzzy automaton over a field are used for generation of linear codes, detection and correction of errors, construction of testing sequence, and generation of pseudo-random sequences of numbers. They are also used in experiments that require Mote Carlo methods, in the protection of data stored in computer systems and radio-location.
In the recent study, we defined the notion of general fuzzy automaton and max-min general fuzzy automaton over a field; we call this automaton vector general fuzzy automaton. Moreover, we presented the concept of max-min vector general fuzzy automaton. We proved that if two max-min VGFA are similar, they constitute an isomorphism. Moreover, we showed that if two VGFA constitute an isomorphism with threshold α, they are equivalent with threshold α, where
Further, we try to present a connection between VGFA and similar automata. Also, we try to present fuzzy finite tree automaton over a fuzzy normed linear space.
References
1 | Abolpour, K., Zahedi, M. ((2017) ). General fuzzy automata based on complete residuated lattice-valued. Iranian Journal of Fuzzy Systems, 14: (5), 103–121. |
2 | Abolpour, K., Zahedi, M., Shamsizadeh, M. ((2020) ). BL-general fuzzy automata and minimal realization: based on the associated categories. Iranian Journal of Fuzzy Systems, 17: (1), 155–169. |
3 | Aceto, L., Ingólfsdóttir, A., Larsen, K.G., Srba, J. ((2007) ). Reactive Systems: Modelling, Specification and Verification. Cambridge University Press. |
4 | Bag, T., Samanta, S. ((2003) ). Finite dimensional fuzzy normed linear spaces. Journal of Fuzzy Mathematics, 11: (3), 687–706. |
5 | Cassandras, C., Lafortune, S. ((2009) ). Introduction to Discrete Event Systems, Number 1. Springer Science & Business Media, Berlin/Heidelberg, Germany. |
6 | Cattaneo, G., Flocchini, P., Mauri, G., Vogliotti, C.Q., Santoro, N. ((1997) ). Cellular automata in fuzzy backgrounds. Physica D: Nonlinear Phenomena, 105: (1–3), 105–120. |
7 | Doostfatemeh, M., Kremer, S.C. ((2003) ). A fuzzy finite-state automaton that unifies a number of other popular computational paradigms. In: Proceedings of the Artificial Neural Networks in Engineering Conference (ANNIE 03’), pp. 441–446. |
8 | Doostfatemeh, M., Kremer, S.C. ((2005) ). New directions in fuzzy automata. International Journal of Approximate Reasoning, 38: (2), 175–214. |
9 | Dovier, A., Piazza, C., Policriti, A. ((2004) ). An efficient algorithm for computing bisimulation equivalence. Theoretical Computer Science, 311: (1-3), 221–256. |
10 | Even, S. ((1965) ). On information lossless automata of finite order. IEEE Transactions on Electronic Computers, 14: (4), 561–569. |
11 | Ghorani, M., Moghari, S. ((2022) ). Decidability of the minimization of fuzzy tree automata with membership values in complete lattices. Journal of Applied Mathematics and Computing, 68: (1), 461–478. |
12 | Ghorani, M., Garhwal, S., Moghari, S. ((2022) ). Lattice-valued tree pushdown automata: pumping lemma and closure properties. International Journal of Approximate Reasoning, 142: , 301–323. |
13 | Jin, J., Li, Q., Li, Y. ((2013) ). Algebraic properties of L-fuzzy finite automata. Information Sciences, 234: , 182–202. |
14 | Kleene, S.C. ((1956) ). Representation of events in nerve nets and finite automata. In: Shannon, C.E., McCarthy, J. (Eds.), Automata Studies, Vol. 34: . Princeton University Press, Princeton, pp. 3–42. https://doi.org/10.1515/9781400882618-002. |
15 | Li, Y.-M., Shi, Z.-K. ((2000) ). Remarks on uninorm aggregation operators. Fuzzy Sets and Systems, 114: (3), 377–380. |
16 | Mordeson, J.N., Malik, D.S. ((2002) ). Fuzzy Automata and Languages: Theory and Applications. CRC Press. |
17 | Pal, P., Tiwari, S., Verma, R. ((2019) ). Different operators in automata theory based on residuated and co-residuated lattices. New Mathematics and Natural Computation, 15: (01), 169–190. |
18 | Peeva, K. ((1991) ). Fuzzy acceptors for syntactic pattern recognition. International Journal of Approximate Reasoning, 5: (3), 291–306. |
19 | Peeva, K.G. ((1988) ). Behaviour, reduction and minimization of finite L-automata. Fuzzy Sets and Systems, 28: (2), 171–181. |
20 | Qiu, D. ((2001) ). Automata theory based on complete residuated lattice-valued logic. Science in China Series: Information Sciences, 44: , 419–429. |
21 | Qiu, D. ((2002) ). Automata theory based on complete residuated lattice-valued logic (II). Science in China Series F: Information Sciences, 45: , 442–452. |
22 | Raisi Sarbizhan, E., Mehdi Zahedi, M., Shamsizadeh, M. (2022). L-graph automata and some applications. The Computer Journal, bxac035. https://doi.org/10.1093/comjnl/bxac035. |
23 | Reiter, C.A. ((2002) ). Fuzzy automata and life. Complexity, 7: (3), 19–29. |
24 | Roggenbach, M., Majster-Cederbaum, M. ((2000) ). Towards a unified view of bisimulation: a comparative study. Theoretical Computer Science, 238: (1–2), 81–130. |
25 | Santos, E.S. ((1968) ). Maximin automata. Information and Control, 13: (4), 363–377. |
26 | Shamsizadeh, M. ((2022) ). Single valued neutrosophic general machine. Neutrosophic Sets and Systems, 49: (1), 33. |
27 | Shamsizadeh, M., Zahedi, M. ((2015) ). Minimal intuitionistic general L-fuzzy automata. Italian Journal of Pure and Applied Mathematics, 35: , 155–186. |
28 | Shamsizadeh, M., Zahedi, M.M. ((2019) ). Bisimulation of type 2 for BL-general fuzzy automata. Soft Computing, 23: (20), 9843–9852. |
29 | Shamsizadeh, M., Zahedi, M.M. ((2022) ). On reduced fuzzy multiset finite automata. Soft Computing, 26: (24), 13381–13390. |
30 | Shamsizadeh, M., Zahedi, M., Abolpour, K. ((2016) ). Bisimulation for BL-general fuzzy automata. Iranian Journal of Fuzzy Systems, 13: (4), 35–50. |
31 | Shamsizadeh, M., Zahedi, M., Abolpour, K. (2020). Reduction of BL-general L-fuzzy automata. Iranian Journal of Mathematical Sciences and Informatics. |
32 | Shamsizadeh, M., Zahedi, M., Golmohamadian, M., Abolpour, K. ((2021) ). Zero-forcing finite automata. International Journal of Industrial Mathematics, 13: (4), 477–488. |
33 | Srivastava, A.K., Tiwari, S. ((2002) ). A topology for fuzzy automata. In: Advances in Soft Computing—AFSS 2002: 2002 AFSS International Conference on Fuzzy Systems Calcutta, India, February 3–6, 2002 Proceedings. Springer, pp. 485–490. |
34 | Starke, P. ((1969) ). Abstrakte Automaten. VEB Deutscher Verlag der Wissenschaften, Berlin. |
35 | Wee, W.G. (1967). On Generalizations of Adaptive Algorithms and Application of the Fuzzy Sets Concept to Pattern Classification. Thesis, Purdue University. |
36 | Ying, M. ((2002) ). A formal model of computing with words. IEEE Transactions on Fuzzy Systems, 10: (5), 640–652. |
37 | Zahedi, M., Horry, M., Abolpor, K. ((2008) ). Bifuzzy (General) topology on max-min general fuzzy automata. Advanced in Fuzzy Mathematics, 3: (1), 51–68. |


